
做了一个能听懂人话的巡检机器人
总体实现框架图: 找了个实际的变电站环境,改动了一下导入到了Gazebo中用作实验的仿真环境 目前有了一个初步的demo,等做完后开源并对算法进行详细的讲解
Autoware中topic_state_monitor模块调研
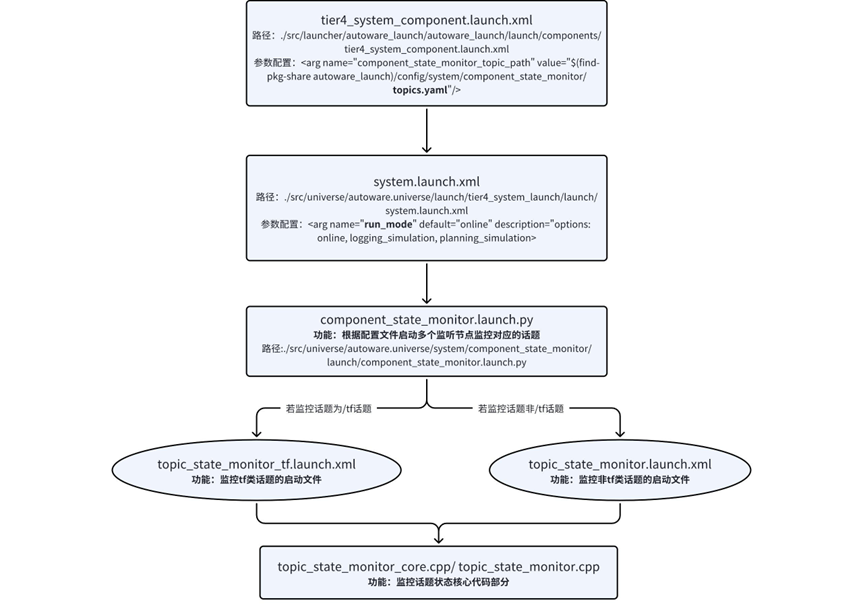
一、topic_state_monitor模块简介此节点用于监控任意话题是否存在异常,例如超时和低频率。话题的诊断结果将通过ROS Diagnostics发布诊断信息。 输入:任意名称、任意类型的话题 输出:/diagnostics 诊断信息 二、topic_state_monitor模块启动流程通过解析 topic_state_monitor 核心代码部分并逐级向上追溯,可得到 topic_state_monitor 模块完整的启动流程,如下图所示:上层的两个 .launch.xml 文件主要配置了两个参数。一个是 tier4_system_component.launch.xml 中配置的 topics.yaml 文件路径。topics.yaml 文件内容是配置所有需要监控的话题信息以及监控阈值信息。配置文件的内容示例如下: 1234567891011121314151617181920212223242526272829303132333435- module: control mode: [online, logging_simulation, planning_s...
Autoware.Universe适配实车教程
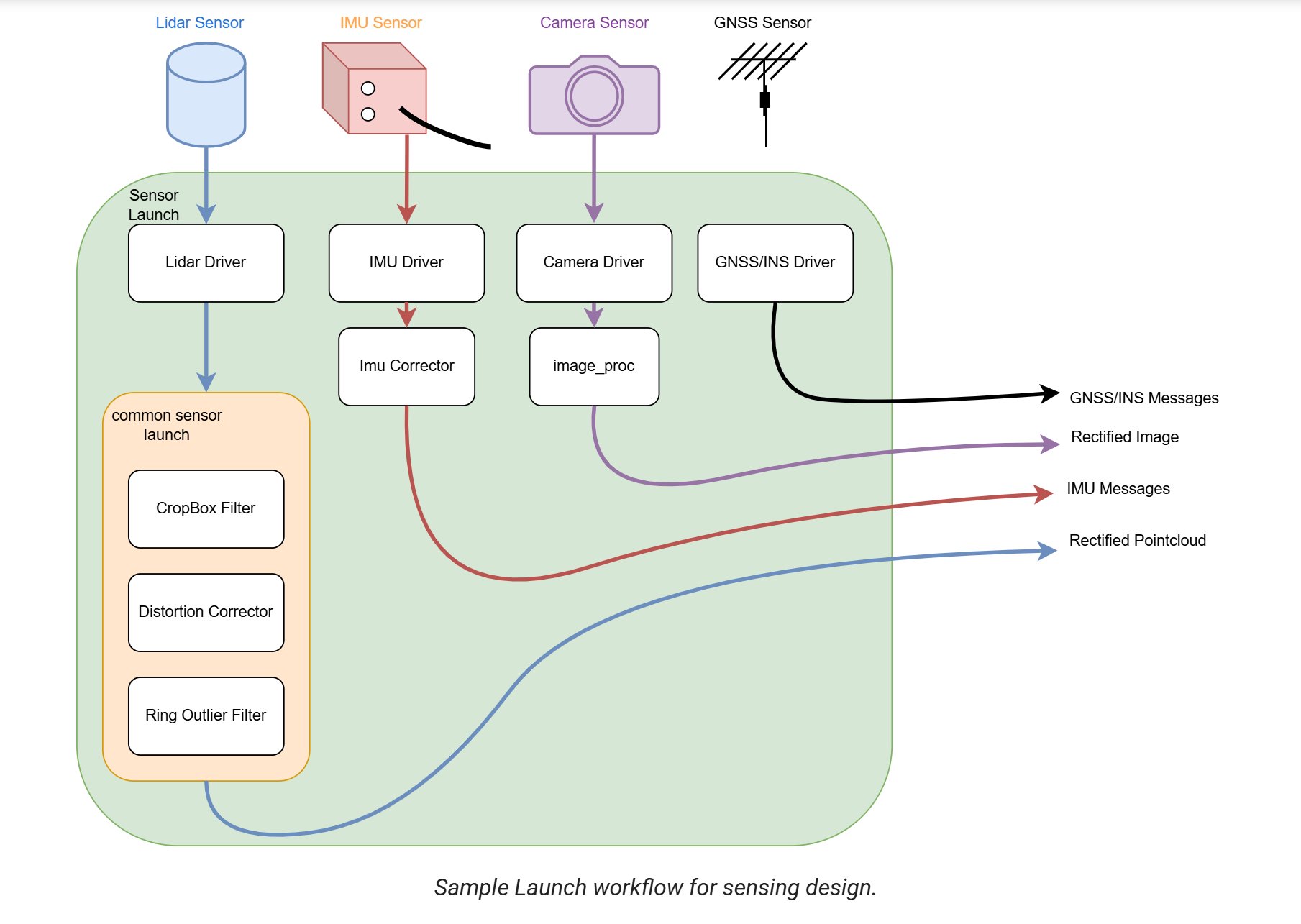
一、适配传感器首先声明,踩了那么多坑后,明白一个道理,要想少出错,少踩坑,还是要遵循一切都参控官方文档的原则。不要怕官网文档繁杂又全是英语想省事,就一切都遵从csdn找到的别人整理的二手文档,包括我以下写的都只能当作参考,每个人硬件软件环境都不一样,具体步骤肯定有所差异,官网还是考虑最全的文档,英语有障碍可以下一个插件,推荐"沉浸式翻译"这个插件。官网文档链接为:https://autowarefoundation.github.io/autoware-documentation/main/how-to-guides/ 设置传感器数据通信接口根据官方提供的流程图,可以看到各个节点之间的数据通信:https://autowarefoundation.github.io/autoware-documentation/galactic/design/autoware-architecture/node-diagram/ 雷达点云设置Autoware输入的点云为 ==/sensing/lidar/top/ou...

Autoware.universe完整部署步骤(踩坑版)
Autoware.universe 安装步骤克隆Autoware到本地123mkdir autoware_universecd autoware_universe/git clone https://github.com/autowarefoundation/autoware.git -b humble 注意ROS的版本 安装NVIDIA 显卡驱动若输入 sudo nvidia-smi 检查英伟达驱动出现以下报错:12Failed to initialize NVML: Driver/library version mismatchNVML library version: 550.90 原因是NVIDIA 内核驱动与系统驱动版本不一致,按照网上提出的方法使用sudo rmmod nvidia 命令退出当前内核使用的显卡模块,重新加载升级后版本的显卡驱动作为我们的内核模块发现此方法不可行 最后解决办法为:卸载驱动1sudo apt-get purge nvidia* 查找本机内核版本1cat /proc/driver/nvidia/version 发现为...
多层长走廊三维SLAM建图实战
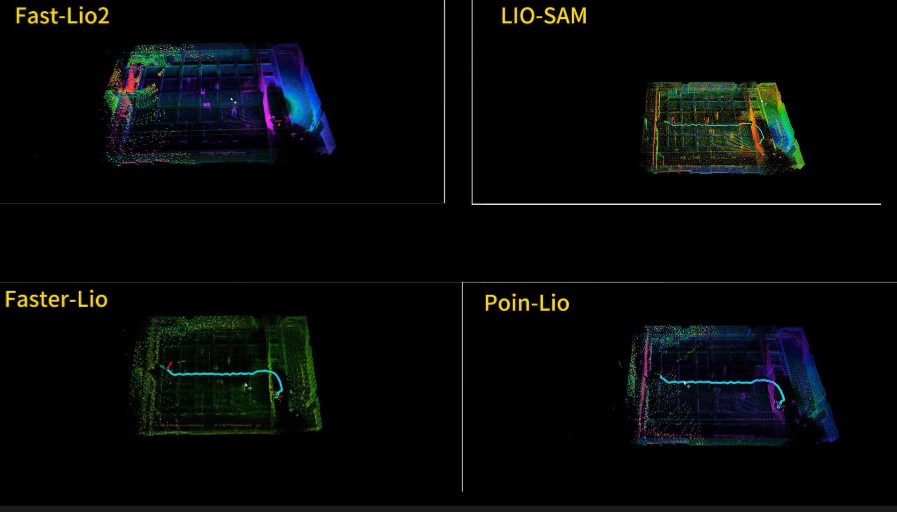
前面把算法在仿真环境都跑通过后,决定拿雷达在真实世界跑一下。先介绍一下最近又发现的两个巨牛的算法:Point-Lio与Faster-lio。 Point-Lio部署Point-Lio是一种鲁棒且高带宽的LIO算法,具备在极端剧烈运动条件下稳定估计的能力,能够提供准确的、高频的里程计测量(4-8 kHz),可应对严重振动和高角速度或线速度的情况。但对算力的要求较高、CPU负载较大。 先安装livox_ros_driver ,单独创一个工作空间,或者和Point-Lio一个工作空间也行。这里新建一个工作空间: 12345mkdir -p livox_ros_driver_ws/src #-p 代表递归创建文件夹cd livox_ros_driver_ws/srcgit clone https://github.com/Livox-SDK/livox_ros_driver.gitcd ..catkin_make 然后安装Point-Lio 123456mkdir -p Point_Lio_ws/srccd Point_Lio_ws/srcgit clone https://git...

CMU-自主探索导航系统(TARE & FAR Planner)部署
去年CMU机器人实验室团队开源了整套的自主探索导航系统,相关文章还荣获IROS2022 最佳学生论文。因此想在实验室的设备上试一下,先跑个官方demo试试。但中文互联网搜索结果的文章质量果然不出我所料,全都是互相抄,下载下来的源码CmakeList文件都是错的😅,最后还是去CMU这个项目的官网才把demo跑起来了。下面记录一下部署过程,我的系统环境是Ubuntu20.04、ROS1 Noetic。 一、安装仿真环境先安装CMU团队制作的仿真环境,仿真环境包含多楼层停车场、隧道、森林、校园等多种复杂环境,能把这些环境跑好说明这个自主探索导航系统还是很有普适性的。 先安装依赖环境 12sudo apt updatesudo apt install libusb-dev 克隆开源存储库 1git clone https://github.com/HongbiaoZ/autonomous_exploration_development_environment.git 更换分支,并编译。 123cd autonomous_exploration_development_enviro...

MID360激光雷达适配LIO-SAM与FAST-LIO2指南
实验室有一个大疆的MID360半固态激光雷达,需要我来探索一个建图效果较好的三维SLAM算法。但是由于是半固态雷达,雷达输出的点云数据格式与普通的多线激光雷达有一些区别,目前业界的激光雷达算法好多都是基于Velodyne的多线雷达格式做的适配,因此在适配LIO-SAM时会遇到诸多问题。 一、适配LIO-SAMLIO-SAM算法对激光雷达的数据格式有着较为严格的要求,以往的单激光雷达建图的算法没注意到这一点,一般要求的是XYZI(x, y, z, intensity ) 格式即可,但是LIO-SAM要求的是 XYZIRT(x, y, z, intensity, ring, timestamp) 格式,即算法内使用了激光雷达的通道数ring参数和时间戳timestep参数,启动算法时会检查是否具有这两个参数,而MID360雷达的输出格式中没有ring与time这两个参数。进一步的,LIO_SAM要用9轴IMU,而MID360内置的IMU是六轴IMU😭。 因此要想适配MID360需要改源码,感谢万能的github,已经有人做好了适配,链接如下:https://github.com/...

Autoware安装 (踩坑指南)
由于工作需要需要学习一下autoware这个框架,但是在安装的时候遇到了数不进的坑,网上的教程基本都跑不起来。自己搞了好半天,终于跑起了个demo,记录一下踩坑的过程。 本次要安装的是Autoware.ai这个版本,他是基于ROS1 Melodic的,需要Ubuntu 18.04的环境,由于我的系统是Ubuntu 20.04,因此需要在Docker中运行ROS1 Melodic环境。 一、安装Docker首先验证系统上没有安装旧版本或不兼容版本的Docker 1sudo apt-get remove docker docker-engine docker.io 看到以下提示就没问题 继续安装一些依赖: 1sudo apt-get update 1sudo apt-get install apt-transport-https ca-certificates curl software-properties-common 然后设置密钥 1curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-ke...

编译雷达驱动PCL库缺失问题
咸鱼淘了个一百多块的镭神雷达,看参数性能还挺不错,而且是TOF测距雷达,原价四五百呢。 雷达参数 之后将驱动包拷贝到工作空间的src目录下后进行编译,可以看到代码包的名称与cmake里project的名称都是lslidar_driver,因此在工作空间目录下输入colcon build –packages-select lslidar_driver编译驱动包。 雷达驱动文件包 但是编译的时候报了错,没有找到pcl_conversions的配置文件。 编译报错 我求助了一下万能的Claude,他让我用apt安装libpcl-dev这个包。 万能的Claude 但是我执行命令后发现我已经安装过这个包了,那为什么还是找不到啊。 接下来他又让我进行设置环境变量,甚至源码编译库文件等等操作,都没有解决这个问题。我后来发现缺失的是pcl_conversions 这个库,但是他却一直让我安装的是libpcl-dev。我又问了Claude这两个有什么区别,看起来libpcl-dev包含了pcl_conversions&...

给旭日X3派适配千兆网卡
由于旭日X3派自带的网卡实在是太拉胯,我家的WIFI都扫不出来,只好外加一USB网卡,购买的是如下款式。 然后就是驱动的配置,如果想自己编译的话可以参考这个博客:体验极速——在旭日X3派上使用双频1300M USB无线网卡_1300m无线网卡实际速度_小玺玺的博客-CSDN博客,这里给出编译好的驱动下载连接:https://pan.baidu.com/s/1qhFyLxFiLhlTaKJfRXK4Ow 提取码:kuq1。 先将驱动文件在Mobaxterm里ssh登录后拷贝至旭日派中,这里我拷贝至了home目录下,然后再执行命令拷贝到系统驱动目录下。 1sudo cp 88x2bu.ko /lib/modules/4.14.87/ 之后使用cd /lib/modules/4.14.87/进入文件夹后输入以下指令对ko文件签名: 1sudo hobot-sign-file 88x2bu.ko 然后输入以下两条指令加载驱动,这个时候可以看到网卡驱动的灯开始闪烁。 1sudo /sbin/depmod -a 4.14.87 1sudo insmod 88x2bu.ko 输入if...