旭日X3派连接不了手机热点解决方法
解决方法其实很简单,旭日派的WIFI模组检测不到5G频段的WIFI,现在的手机开启热点默认都是5G频段,因此将手机热点的频段改为2.4G即可,注意热点名称也不能带有中文。 接下来输入命令来扫描WIFI网络: 1sudo nmcli device wifi rescan 列出找到的WIFI网络: 1sudo nmcli device wifi list 连接某指定的WIFI网络: 1sudo wifi_connect "你要连接的wifi名" "wifi密码" 等到终端返回信息“successfully activated”,就说明WIFI连接成功。我们可以Ping一个网站,来检查一下连接。如果能够Ping通,就说明网络已经连接成功,现在就可以成功连接到互联网了。 设置开机自动连接: 1nmcli connnection modify 你的wifi名 connection.autoconnect yes

动手学ROS2
最近入手了地平线旭日X3派,发现此开发板对ROS2环境有很好的支持,于是决定在原已经安装了ROS1的Ubuntu系统上再安装ROS2环境,经过一番搜寻发现这是可行的,主要参考这篇博客ubuntu20.04安装ros2,并与ros1共存。其原理就是在.bashrc文件(可在根目录下按“ctrl”+“h”显示出.bashrc文件)里写一段shell脚本,根据不同的版本source不同的环境变量。终端中输入“1”就引用ROS1的环境变量,输入其他数字就引用ROS2的环境变量。 1234567891011echo "ROS noetic (1) or ROS2 foxy (2)?"read editionif [ "$edition" -eq "1" ];then source /opt/ros/noetic/setup.bash #这是ros1根目录环境变量 source ~/catkin_ws/devel/setup.bash#这是ros1工作空间环境变量 echo using ros noeticelse sou...
ROS环境搭建
要开始着手做毕业设计了,毕业设计打算基于ROS系统搭建一个变电站巡检机器人,学习ROS系统要先在Linux环境下搭建好ROS环境,由于官网很多资源服务器都在境外,不借助梯子搭建起来还是蛮费事的,所以下面介绍一种适合国内网络环境搭建ROS环境的方法。这里强烈推荐B站一个质量极高的ROS教程,以下的大部分安装教程均出自该Up主机器人工匠阿杰的个人空间_哔哩哔哩_bilibili。 目前最新的ROS已经更新到ROS2 Humble LTS(长期支持版本),但是目前教程资源与软件相对丰富的版本是基于Ubuntu20.04的ROS1 Noetic版本。 安装Ubuntu系统这里我选择通过通过VMware虚拟机安装Ubuntu,详细教程见(117条消息) VMware虚拟机安装Ubuntu 2022最新版详细图文安装教程(VMware虚拟机安装+Ubuntu下载+VMware虚拟机配置运行)_vmware安装ubuntu_Code_流苏的博客-CSDN博客,如果要使用Noetic版本的ROS一定要下载20.04版本的,如果下成22.04版本的就要使用ROS2了,这里直接贴出清华镜像源的Ubu...

SimpleFOC环境配置
首先强烈推荐安装Arduino2.0版本,界面更加美观(类似于VSCode),同时支持代码补全、代码导航功能,编译速度也更快。官网网址为Software | Arduino,在里面选择你操作系统对应的下载版本即可。 安装完成后可通过file->perferences里Language一栏选择“中文(简体)”。勾选“编辑快速建议”可获得代码补全功能。 这里我使用的是Esp32开发板,所以接下来安装Esp32开发板的库,在文件->首选项中“其他开发板管理器地址”一栏中填入以下网址 1https://github.com/espressif/arduinoesp32/releases/download/2.0.6/package_esp32_index.json 然后再左竖侧栏第二个“开发板管理器”中搜索esp32,点击安装。 这里由于官方服务器在境外所以下载会比较慢(除非科学上网),也可以直接直接把要下载的文件从云盘中下载下来,这里贴出百度网盘链接: 12链接:https://pan.baidu.com/s/1qB-gKuRlpB8bsL-7sx1epA 提取码:b...
巡检防疫机器人
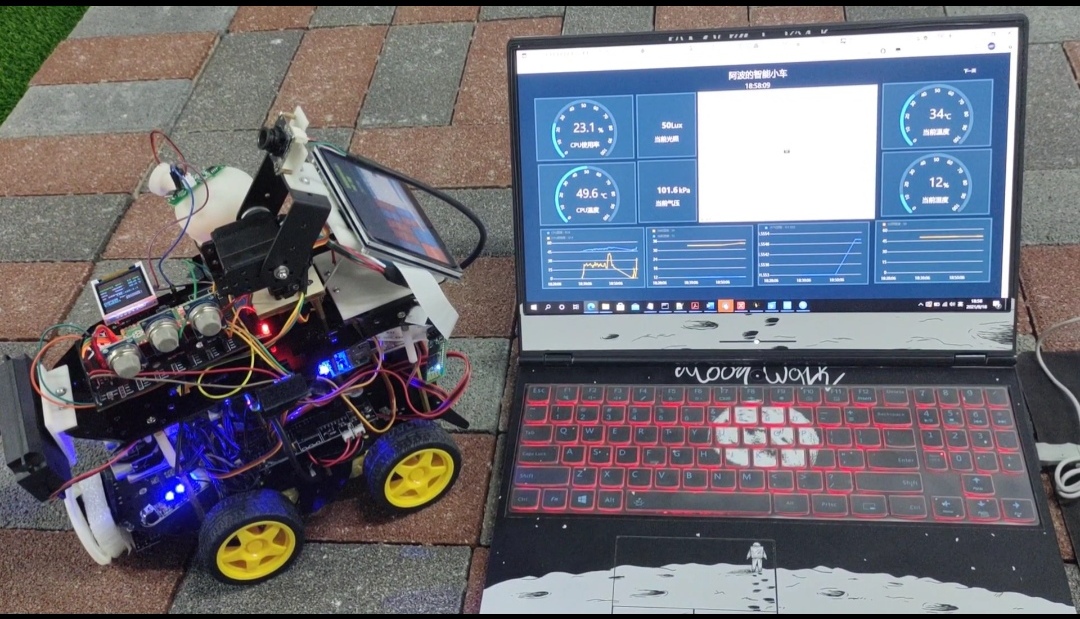
去年大半年的时间借着参加各种工科竞赛的功夫做了一辆巡检机器人,通过搭建这款巡检机器人,边学边做有了一定的Python和C语言的编程基础,可以绘制一些初级的PCB电路板,从前端到后端、Linux系统的使用、服务器的搭建都有了一定的了解。接下来就主要介绍这辆巡检机器人的主要功能及实现过程。 巡检防疫机器人外观 功能做这款机器人的起始时间正值新冠疫情刚开始,因此将这辆巡检机器人的应用背景定为防疫相关。智能防疫机器人可通过摄像头识别人脸是否正确佩戴口罩。机器人还搭载有消毒模块,可开启消毒模式实现定点喷杀消毒,同时搭的温湿度传感器、可燃气体传感器、空气质量传感器等,可将传感器数据上传至云端并在Web界面实时显示分析,若检测到异常数值可在钉钉群里通过钉钉机器人推送告警信息。 Web可视化界面1 Web可视化界面2 实现原理系统硬件设计本文设计的智能防疫机器人的控制计算单元使用了‘’大脑‘’+‘’小脑‘’的设计方案,底层的STM32控制板为低算力、低时延、运行实时操作系统的‘’小脑‘’,用于控制底层电机,采集传感器数据等;上层的树莓派为高算力、高...
卧龙凤雏的电磁炮
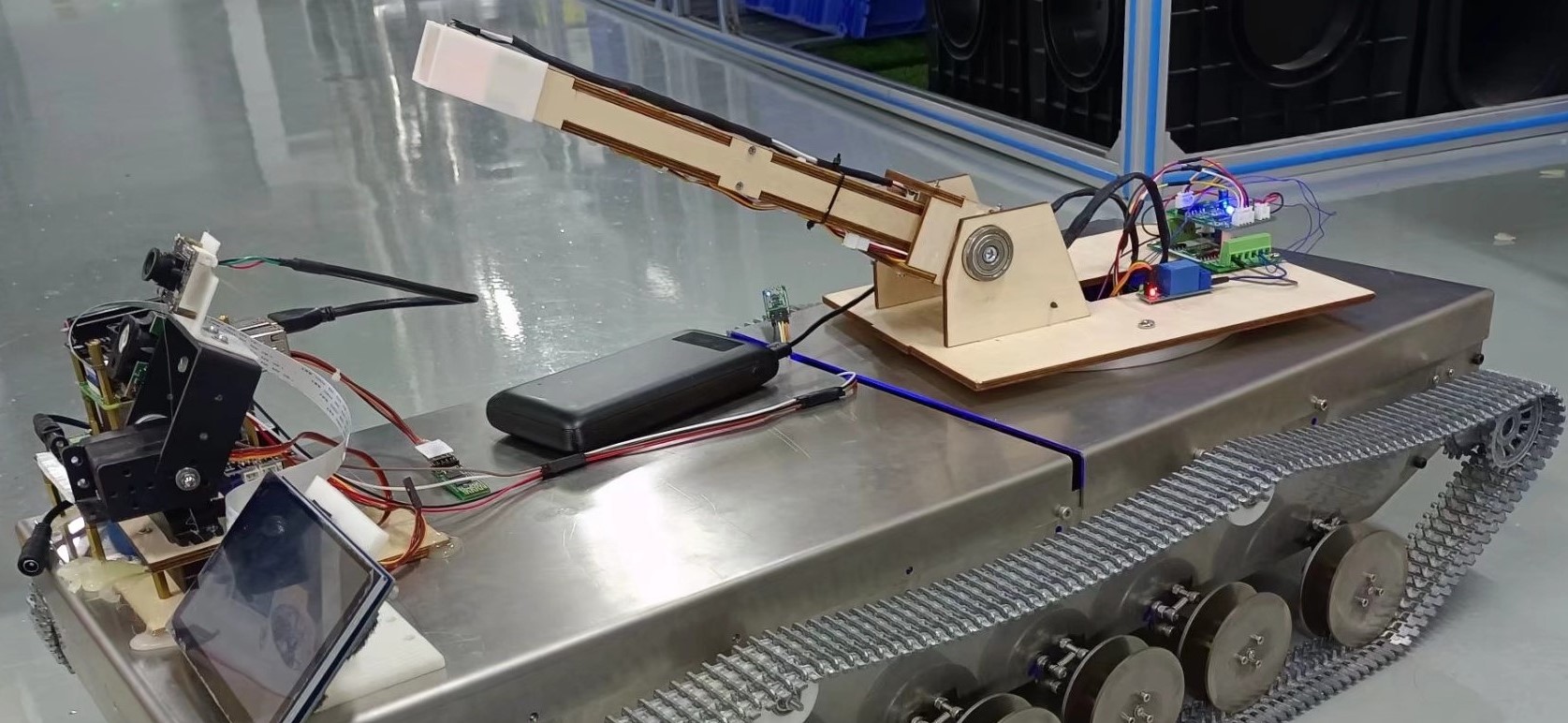
团队介绍首先贴出卧龙凤雏团队与电磁炮的合影 最中间是总策划、酷爱军事、从小就造飞机的“曹工”,主要负责坦克车体外观及机械结构及PCB电路板的设计;左边的是我,负责机器人顶层控制逻辑中的视觉识别与追踪;右边是负责车体底层控制的“陈工”。 制作过程外形设计底盘设计机器人底盘长788.45mm,宽308.00mm,高153.51mm,悬挂采用的是克里斯蒂悬挂系统,即一种拥有大直径负重轮,使用螺旋弹簧的独立式悬挂装置。这种悬挂均是由前后两个互相连接的圆柱形螺旋弹簧构成。位于前方的为可调式水平螺旋弹簧,后方的则是垂直螺旋弹簧,这种设计有更长的避震行程,可强化越野性能。 机器人底盘侧视图 “曹工”组装车体 组装完成 磁加速系统设计 磁加速系统实际模型 炮台底座也使用木制材料,中间开有41mm*174mm的矩形孔为炮位提供移动的空间,整个炮塔通过螺栓固定在履带底盘上部的旋转滑台上。磁加速系统的加速段整体用木板封装起来以此来达到绝缘的效果;为了防止热量堆积在炮管支架的木板上每一级加速线圈周围都开有方形空用来散热; 磁加速系统炮管 电磁加速系统为...
回顾21年电赛
说实话挺不想回顾这场电赛的,因为这次比赛的结果与付出严重不成正比,但生活的真相就是这样,努力有时不一定会有回报,罗曼罗兰曾经说过:“世上只有一种英雄主义,就是认清生活的真相之后依然热爱生活”。 最终作品,一个送药小车 题目介绍其他组的题目都是关于信号采集,AC/DC的这方面没怎么接触过,只有F组是关于送药小车的,正好手头有一个车架,于是就选了F组的题目。题目要求是先搭建下图带有几个路口的赛道,一共有八个药房,小车从起点出发前要先识别一个1到8的数字,然后根据识别到的结果小车需要沿着红线找到对应的药房。 题目要求 实现过程电赛每个小组有三个人,小组另外两个人,一个人只会写文档,一个人资历尚浅(现已是大牛),所以基本除了写文档的所有工作都落我头上了😭。首先要解决的就是识别数字,最好的方案就是拿K210,因为K210训练部署视觉识别模型迅速,并且有专门的NPU((神经网络处理单元)加速单元,识别也较为迅速。但是由于学校对于这类比赛很是轻视,没有任何资金补助(连电赛要用的纸箱子都不提供),赛前并未准备这类视觉识别模块。手头只有一个树莓派,网上利...