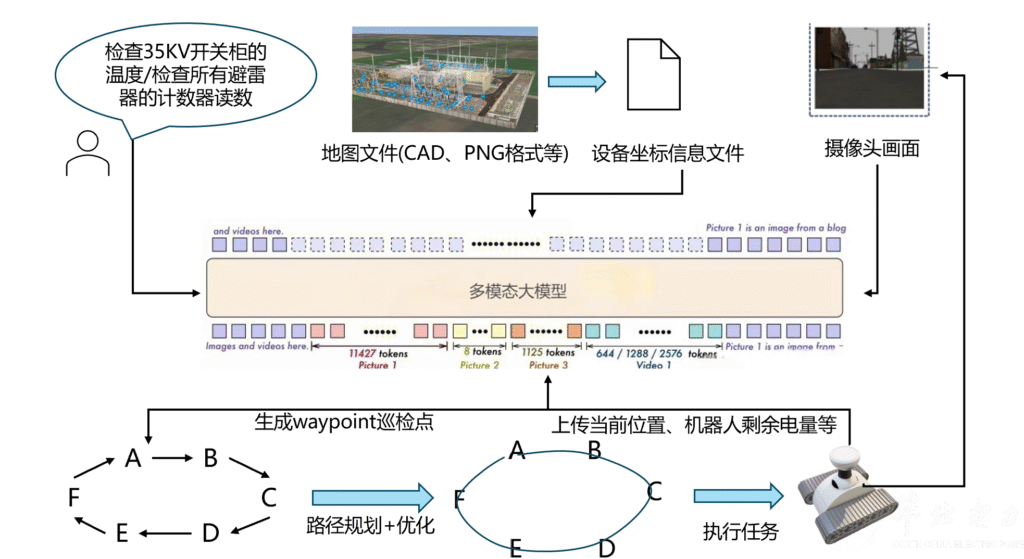
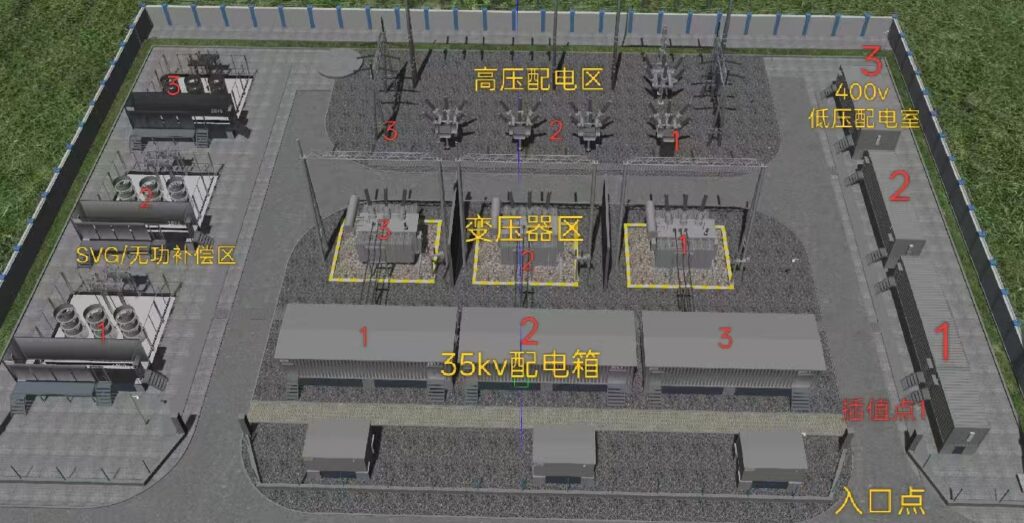
DIY ROS 路径规划做了一个能听懂人话的巡检机器人总体实现框架图:找了个实际的变电站环境,改动了一下导入到了Gazebo中用作实验的仿真环境目前有了一个初步的demo,等做完后开源并对算法进行详细的讲解