
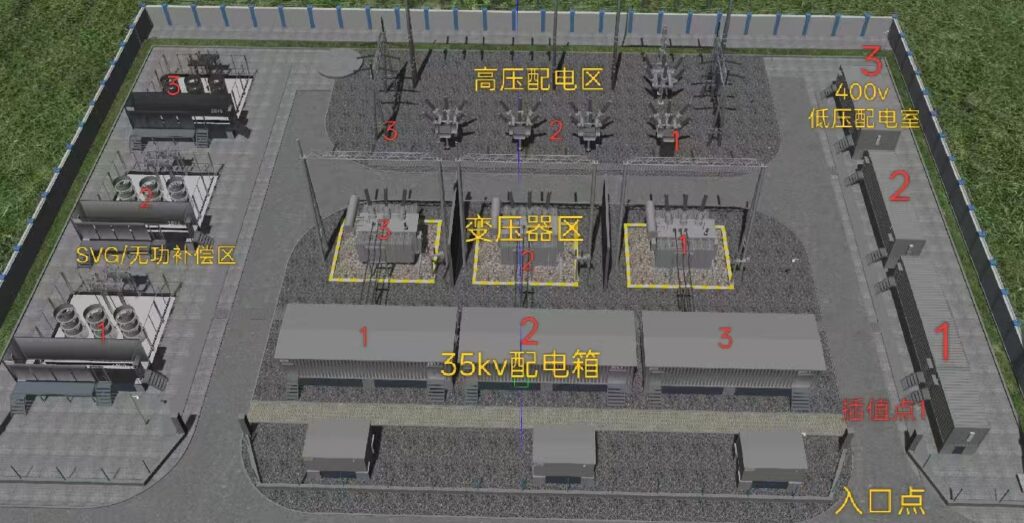
找了个实际的变电站环境,改动了一下导入到了Gazebo中用作实验的仿真环境
目前有了一个初步的demo,等做完后开源并对算法进行详细的讲解
找了个实际的变电站环境,改动了一下导入到了Gazebo中用作实验的仿真环境
找了个实际的变电站环境,改动了一下导入到了Gazebo中用作实验的仿真环境
目前有了一个初步的demo,等做完后开源并对算法进行详细的讲解
找了个实际的变电站环境,改动了一下导入到了Gazebo中用作实验的仿真环境
此节点用于监控任意话题是否存在异常,例如超时和低频率。话题的诊断结果将通过ROS Diagnostics发布诊断信息。
/diagnostics 诊断信息通过解析 topic_state_monitor 核心代码部分并逐级向上追溯,可得到 topic_state_monitor 模块完整的启动流程,如下图所示: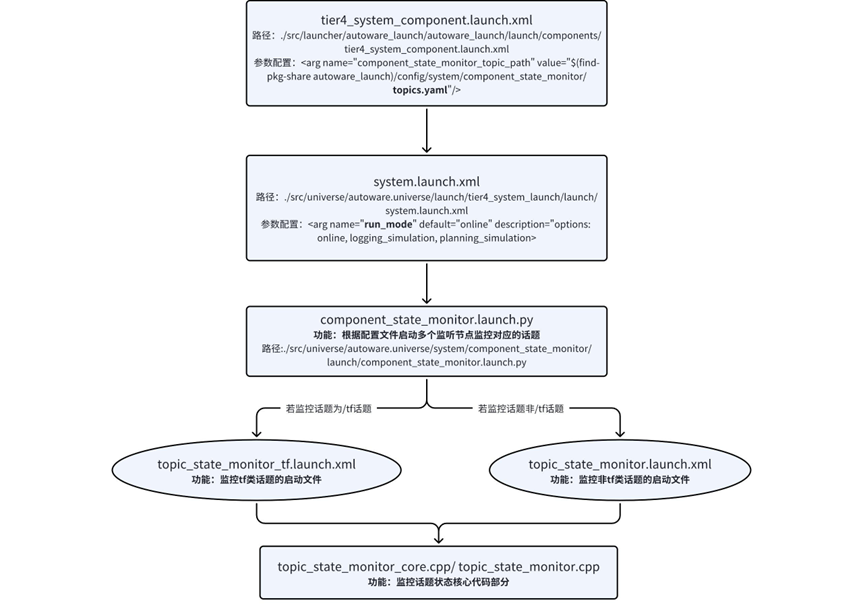
上层的两个 .launch.xml 文件主要配置了两个参数。一个是 tier4_system_component.launch.xml 中配置的 topics.yaml 文件路径。topics.yaml 文件内容是配置所有需要监控的话题信息以及监控阈值信息。配置文件的内容示例如下:
1 | - module: control |
代码2-1 topics.yaml配置⽂件⽰例
配置文件的各个参数的解释如下:
| 名称 | 含义 |
|---|---|
module | 话题所属的模块 |
mode | 指定了配置适用的模式,通过设置 mode,可以控制配置文件在不同运行环境下是否生效 |
type | 指定话题的类型,根据不同的 type 分类,component_state_monitor 模块会分析 /diagnostics 诊断信息给出 /type/module 模块的状态(判断是否正常运行,消息类型为自定义的 ModeChangeAvailable) |
node_name_suffix | 节点名称的后缀,用于动态生成节点名称 |
topic | 指定要监控的目标话题的名称 |
topic_type | 指定目标话题的数据类型 |
best_effort | 指定是否使用 "Best Effort" QoS策略。如果设置为 true,意味着使用“尽力而为”策略,即消息传输尽力而为,可能会丢失消息。设置为 false 则表示采用 "Reliable" QoS策略,确保消息的可靠传输,但可能带来更高的延迟。 |
transient_local | 指定是否使用 "Transient Local" QoS策略。如果设置为 true,即使订阅者在发布时不存在,消息也会暂时保存在中间件中,直到订阅者连接。此策略适用于需要历史消息的场景。如果设置为 false,则采用普通的QoS策略,只有当前连接的订阅者可以接收到发布的消息。 |
warn_rate | 话题发布频率警告阈值,当话题的发布频率低于该值时,话题状态将被设置为 WarnRate,即警告状态 |
error_rate | 话题发布频率错误阈值,当指定当话题的发布频率低于该值时,话题状态将被设置为 ErrorRate,即错误状态 |
timeout | 这个参数指定如果话题订阅在超过指定的时间(单位为秒)内没有收到消息,话题状态将被设置为 Timeout |
frame_id | 坐标变换的父坐标系ID |
child_frame_id | 坐标变换的子框架ID |
window_size | 计算目标主题频率使用的窗口大小,例如,窗口大小为10表示计算过去10个发布周期的频率 |
uprate_rate | 定时器回调频率,用于设置更新和检查主题状态的频率 |
system.launch.xml 文件中设置了配置所选择的模式,根据模式的选择来监听不同的话题组。话题所属的模式在上述 topics.yaml 文件中设置。
1 | <arg name="run_mode" default="online" description="options: online, logging_simulation, planning_simulation |
最终通过 component_state_monitor.launch.py 生成了一系列针对目标话题的监控节点。这些节点发布诊断数据到 /diagnostics 话题中。
运行 Autoware 的规划demo样例后:
1 | cd autoware |
然后运行 ros2 node list 可以看到 topic_state_monitor 模块运行起来一些监控节点来对配置文件中的话题进行监控。监控节点名称为:“topic_state_monitor” + topic.yaml 中话题的 node_name_suffix 名称。

这些节点输出诊断信息到 ROS Diagnostics 诊断系统中,可以在 rqt_runtime_monitor 中看到诊断结果。

同时,component_state_monitor::StateMonitor 节点的 main.cpp 订阅 /diagnostics 话题并通过定时器周期性地检查不同模块整体的状态是否正常。输出的话题格式是 /type/moduletype 为 launch 中的 map 模块,输出话题为 /launch/map。
话题输出的消息格式是自定义的 ModeChangeAvailable.msg 格式,用于表示某个模块是否可用。消息包含以下内容:
stamp:时间戳,表示消息生成的时间。available:布尔值,表示该模块当前是否有效。true 表示模块正常,false 表示模块不可用。
分析源码后总结下来,其核心是通过 component_state_monitor.launch.py 对 config.yaml 文件中要监控的 topic 一对一创建一个 node。
随后将 node 启动部分注册成一个插件,这样可以用同一个源码启动多个 node。在 node 源码中,根据监控 topic 是否为 tf 话题创建 tf 类订阅者和非 tf 类订阅者。这里针对非 tf 类 topic,使用了 rclcpp::SerializedMessage 一个通用的消息类型,表示经过序列化的消息。它不关心消息的具体内容,只是将消息传递为原始的字节流。

topic_state_monitor 模块可针对任意类型的 topic 生成一个 node 去监控 topic 的状态,通用性强。但如果需要监控的 topic 过多可能进程开销大,因此要对该模块对于性能的开销进行测试来判断是否可迁移到人形机器人上。
topic_state_monitor 模块采用了组合节点并将组合节点放入 container 中来启动一堆 node 去监控各个 topic。这样做的好处是将多个节点加载到同一个进程中,每个节点仍然保持独立的逻辑和功能,但它们可以更高效地共享数据和资源。这种方法不仅减少了通信延迟,而且降低了系统的整体资源消耗(例如,CPU时间内存使用)。
实际使用 Autoware 进行测试时发现,输入 ros2 component list 查看容器节点信息可知组合节点 /system/component_state_monitor/component 有被放入 /system/component_state_monitor/container 容器中。
但是查询系统进程资源占用情况时发现:启动的各个监控 node 并没有在同一个进程中进行,而是各自占用了一个进程,这样性能总开销过大。
猜测是启动文件中 node 的启动方式存在问题。经过分析发现问题出在 component_state_monitor.launch.py 启动文件对于 node 节点的启动是通过启动一个个 launch.xml 文件来生成监控 node 节点,并没有将 node 节点放入 container 容器中,因此占用了多个进程。
想要减少进程的占用,需要重构 component_state_monitor.launch.py 对于 node 节点的启动部分。修改后的代码如下:
1 | from collections import defaultdict |
代码修改后运行可发现监控 node 成功被放入 container 容器中在同一个进程中运行。
但是检查进程占用情况发现 component_state_monitor 进程总占用在 70% 左右,占用过高。
修改参数列表中的 window_size 与 update_rate,将其从默认的 10 调小至 2 后,占用可下降至 15% 左右。
经分析,TopicStateMonitor 的逻辑本身相对简单,只是维护一个时间戳队列、计算话题接收速率,并根据阈值进行状态判断。单独看这段代码,性能开销并不大,主要是一些基本的内存操作(push_back、pop_front)、时间计算和简单的条件判断。这些操作本身不是CPU占用的主要来源。
然而,当有 15个 这样的监控节点,每个节点都在高频率地接收消息并调用 update() 函数时,整体系统的CPU使用率就可能显著增加。由于 Autoware 系统繁杂臃肿,消息的频率不太好手动控制。为了控制变量研究消息频率与数量对监控模块占用系统资源的情况,于是手动创建一些节点,观察不同 topic 数量、频率与 QoS 策略下的系统资源占用情况。
测试编写脚本创建多个发布者发布 std_msgs/msg/String 格式的话题,然后启动 topic_state_monitor,其中 window_size 设为 2、update_rate 设为 1。之后对 topic_state_monitor 进程的 CPU 占用率进行监控 120秒,每秒测两次,将测试结果绘制成表格如下所示:
| 影响因素 | Topic数量 | Topic频率 | best_effort | transient_local | 平均占用率 | 最小占用率 | 最大占用率 | Topic频率对占用率的影响 |
|---|---|---|---|---|---|---|---|---|
| 15 | 5 | false | true | 3.55% | 2.0% | 5.0% | ||
| 15 | 10 | false | true | 4.53% | 3.0% | 6.0% | ||
| 15 | 15 | false | true | 5.63% | 3.0% | 7.0% | ||
| 15 | 20 | false | true | 8.44% | 4.0% | 12.0% | ||
| 15 | 35 | false | true | 10.23% | 4.0% | 14.0% | ||
| 15 | 40 | false | true | 11.36% | 8.0% | 16.0% | ||
| 15 | 45 | false | true | 13.87% | 10.0% | 18.0% | ||
| 15 | 50 | false | true | 14.30% | 10.0% | 18.0% | ||
| QoS策略对占用率的影响 | 15 | 50 | false | false | 12.47% | 8.0% | 16.0% | |
| 15 | 50 | true | true | 11.42% | 8.0% | 16.0% | ||
| 15 | 50 | true | false | 11.17% | 6.0% | 16.0% | ||
| Topic数量对占用率的影响 | 20 | 50 | true | false | 16.30% | 10.0% | 22.0% | |
| 10 | 50 | true | false | 6.54% | 4.0% | 12.0% | ||
| 5 | 50 | true | false | 4.54% | 2.0% | 8.0% |
由表格数据可以得出结论:
topic_state_monitor 模块对系统的占用。如果以 15% 的占用率为界限定义为对 CPU 占用较少、为可用状态的话,那么 15个50Hz的Topic以下 或者 更多的更低Hz的Topic、更少的更高Hz的Topic 为此监控系统工作的最佳状态。best_effort 为 true,即不使用 reliable 可靠性传输策略;设置 transient_local 为 false,即不使用 Volatile 持久性 QoS 策略。这样可以牺牲一点消息传输的可靠性来换取更低的资源占用。topic_state_monitor 模块可针对任意类型的 topic 生成一个 node 去监控 topic 的状态,通用性强。但如果需要监控过多高频的 Topic 消息可能会导致进程开销大。因此 Autoware 中对进行监控的 topic 进行了模块化分类处理,根据不同的应用场景选择性地监控关键模块的关键话题。例如,定位模块着重关注 map 到 base_link 的 tf 转换是否正常,控制模块着重关注发布的 control_cmd 控制 topic 是否正常。
首先声明,踩了那么多坑后,明白一个道理,要想少出错,少踩坑,还是要遵循一切都参控官方文档的原则。不要怕官网文档繁杂又全是英语想省事,就一切都遵从csdn找到的别人整理的二手文档,包括我以下写的都只能当作参考,每个人硬件软件环境都不一样,具体步骤肯定有所差异,官网还是考虑最全的文档,英语有障碍可以下一个插件,推荐"沉浸式翻译"这个插件。
官网文档链接为:https://autowarefoundation.github.io/autoware-documentation/main/how-to-guides/
根据官方提供的流程图,可以看到各个节点之间的数据通信:https://autowarefoundation.github.io/autoware-documentation/galactic/design/autoware-architecture/node-diagram/
Autoware输入的点云为 ==/sensing/lidar/top/outlier_filtered/pointcloud== 和 ==/sensing/lidar/concatenated/pointcloud==(frame_id均为base_link)。
/sensing/lidar/top/==outlier_filtered==/pointcloud用于==定位==,
/sensing/lidar/==concatenated==/pointcloud用==于感知==;
打开终端并执行以下命令来创建工作空间和功能包:
1 | mkdir -p /home/buaa/autoware_universe/autoware/src/sensor_driver/robosense_ws/src |
编写玩节点代码:
1 | #include <rclcpp/rclcpp.hpp> |
然后编译:
1 | colcon build --packages-up-to lidar_transform |
然后遵从Autoware.Universe官网教程 https://autowarefoundation.github.io/autoware-documentation/main/how-to-guides/integrating-autoware/creating-vehicle-and-sensor-model/creating-sensor-model/ 更改/home/buaa/autoware_universe/autoware/src/sensor_kit/sample_sensor_kit_launch/sample_sensor_kit_launch/launch 路径下的传感器启动文件
由于只用一个雷达,故不使用点云融合功能包,设置use_concat_filter为false,并发布lidar_transform点云tf转换功能包
1 | <launch> |
添加雷达驱动,并发布雷达话题tamagawa/imu_link到base_link的tf转换
1 | <launch> |
由于上述启动传感器时都发布了对应到baselink的tf转换,故禁用掉官方源码中发布的车体传感器tf转换部分。打开/home/buaa/autoware_universe/autoware/src/universe/autoware.universe/launch/tier4_vehicle_launch/launch 文件夹下的vehicle.launch.xml
注释掉vehicle description部分
单独启动传感器的命令为:
1 | ros2 launch tier4_sensing_launch sensing.launch.xml |
https://autowarefoundation.github.io/autoware-documentation/main/how-to-guides/integrating-autoware/creating-vehicle-interface-package/creating-vehicle-interface/
根据官网教程一步一步编写vehicle_interface来创建底盘驱动与Autoware之间的联系:
1 | cd <your-autoware-dir>/src/vehicle/external |
从 Autoware 订阅控制命令主题的一些必要主题以控制车辆,具体话题描述参考官网,其核心是将接收到的autoware控制话题==control/command/control_cmd==提取出控制指令转化为底盘可以接受的==cmd_vel==话题格式,同时将一些必要的车辆状态主题发布。
以下为脚本内容
1 | import rclpy |
创建launch文件my_vehicle_interface.launch.xml:
1 | <launch> |
修改CMakeLists.txt与package.xml后编译:
1 | colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select my_vehicle_interface |
如果运行遇到找不到py文件的问题,可能是没有赋予其运行权限
在 vehicle_interface.py 的开头添加执行指令
1 | #!/usr/bin/env python3 |
1 | chmod +x scripts/vehicle_interface.py |
然后找到/home/buaa/autoware_universe/autoware/src/universe/autoware.universe/launch/tier4_vehicle_launch/launch 路径下的vehicle.launch.xml 将vehicle_interface部分改成自己的:
1 | <!-- vehicle interface --> |
但是为了调试便利,还是注释掉上述部分,选择单独启动vehicle interface:
1 | ros2 launch my_vehicle_interface my_vehicle_interface.launch.xml |
首先声明,踩了那么多坑后,明白一个道理,要想少出错,少踩坑,还是要遵循一切都参控官方文档的原则。不要]]>
1 | mkdir autoware_universe |
注意ROS的版本
1 | Failed to initialize NVML: Driver/library version mismatch |
原因是NVIDIA 内核驱动与系统驱动版本不一致,按照网上提出的方法使用sudo rmmod nvidia 命令退出当前内核使用的显卡模块,重新加载升级后版本的显卡驱动作为我们的内核模块发现此方法不可行
最后解决办法为:
卸载驱动
查找本机内核版本
发现为550.90.07
于是尝试安装550版本的驱动
出现报错
2
3
4
dpkg: 处理归档 /tmp/apt-dpkg-install-WqT5B5/04-libnvidia-compute-550_550.90.07-0ubuntu1_amd64.deb (--unpack)时出错:
正试图覆盖 /usr/lib/x86_64-linux-gnu/libnvidia-gpucomp.so.550.90.07,它同时被包含于软件包 libnvidia-gl-550:amd64 550.90.07-0ubuntu0.22.04.1
dpkg-deb: 错误: 粘贴 子进程被信号(Broken pipe) 终止了具体是 libnvidia-compute-550 和 libnvidia-gl-550 包在更新时发生了冲突
1 | sudo dpkg --remove --force-remove-reinstreq libnvidia-compute-550 libnvidia-compute-550:i386 |
1 | sudo apt-get clean |
1 | sudo apt-get install nvidia-driver-550 nvidia-settings nvidia-prime |
1 | sudo dkms autoinstall |
1 | sudo reboot |
再次使用 nvidia-smi 检查驱动显示驱动正常
鱼香ros一键安装:
1 | wget http://fishros.com/install -O fishros && . fishros |
1 | sudo apt update && sudo apt install -y \ |
1 | python3 -m pip install -U \ |
1 | sudo apt-get purge ansible |
1 | sudo apt-get update |
1 | sudo apt-get install -y git-lfs |
1 | pip3 install gdown |
1 | sudo apt install geographiclib-tools |
1 | # 注意官网给的是mian,humble的 |
1 | wget -O /tmp/amd64.env https://raw.githubusercontent.com/autowarefoundation/autoware/galactic/amd64.env && source /tmp/amd64.env |
1 | pip3 install gdown |
1 | sudo apt install geographiclib-tools |
1 | clang_format_version=14.0.6 |
查看amd64.env,可以看到推荐的CUDA版本为12.3,在https://developer.nvidia.com/cuda-toolkit 官网中选择版本,为了避免因为CUDA版本太高,cuDNN、TensorRT无法使用,故下载CUDA12.0
网页中选择好CUDA版本安装deb方式安装:
1 | wget https://developer.download.nvidia.com/compute/cuda/repos/ubuntu2204/x86_64/cuda-keyring_1.0-1_all.deb |
设置环境变量
1 | export PATH=/usr/local/cuda-12.0/bin:$PATH |
检查CUDA版本:
1 | nvcc --version |
在官网https://developer.nvidia.com/rdp/cudnn-archive 下载好cuDNN v8.9.5 for CUDA12.X后,解压文件
1 | tar -xvf cudnn-linux-x86_64-8.9.5.30_cuda12-archive.tar.xz |
将解压后的头文件和库复制到cuda目录中:
1 | cd cudnn-linux-x86_64-8.9.5.30_cuda12-archive/ |
cuDNN安装完成,查看安装的版本:
1 | cat /usr/local/cuda/include/cudnn_version.h | grep CUDNN_MAJOR -A 2 |
在官网https://developer.nvidia.com/nvidia-tensorrt-8x-download选择TensorRT 8.6进行下载后解压:
1 | sudo dpkg -i nv-tensorrt-*.deb |
配置环境变量:将TensorRT的库路径添加到LD_LIBRARY_PATH中,编辑~/.bashrc文件并添加以下内容:
1 | export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/x86_64-linux-gnu/ |
重启终端:保存~/.bashrc文件并执行以下命令使配置生效:
1 | source ~/.bashrc |
安装完成后,您可以通过运行以下命令验证TensorRT是否已成功安装:
1 | dpkg -l | grep TensorRT |
1 | cd autoware/ |
克隆存储库:
1 | cd autoware |
安装依赖的 ROS 包
1 | sudo rosdep init |
编译:
1 | colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release |
单独编译某个包:
1 | colcon build --packages-up-to <name-of-pkg> |
清理并重新构建:有时候构建过程中的残留文件可能会导致问题。尝试清理以前的构建文件并重新构建项目:
1 | rm -rf build install log |
/home/buaa/TensorRT-8.6.1.6/include/NvInferRuntime.h:674:61: error: unused parameter ‘pluginFactory’ [-Werror=unused-parameter]
674 | void const blob, std::size_t size, IPluginFactory pluginFactory) noexcept
|^~~
cc1plus: all warnings being treated as errors
gmake[2]: [CMakeFiles/tensorrt_common.dir/build.make:76: CMakeFiles/tensorrt_common.dir/src/tensorrt_common.cpp.o] Error 1
gmake[1]: [CMakeFiles/Makefile2:137: CMakeFiles/tensorrt_common.dir/all] Error 2
gmake: *** [Makefile:146: all] Error 2
这个错误主要是由于编译器将所有警告都视为错误,而NvInferRuntime.h中的一个未使用的参数pluginFactory触发了这个警告
找到包含tensorrt_common包的CMakeLists.txt文件:
1 | find . -name "CMakeLists.txt" | grep tensorrt_common |
终端输出:
1 | ./src/universe/autoware.universe/common/tensorrt_common/CMakeLists.txt |
修改CMakeLists.txt文件,在CMakeLists.txt文件中添加以下行,忽略未使用参数的警告:
1 | set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wno-error=unused-parameter") |
CMake Warning at CMakeLists.txt:20 (message):
cuda, cudnn, tensorrt libraries are not found
1 | export PATH=/usr/local/cuda/bin${PATH:+:${PATH}} |
编译警告1:
— stderr: elevation_map_loader
CMake Warning at CMakeLists.txt:16 (find_package):
By not providing “Findrosbag2_storage_sqlite3.cmake” in CMAKE_MODULE_PATH
this project has asked CMake to find a package configuration file provided
by “rosbag2_storage_sqlite3”, but CMake did not find one.
Could not find a package configuration file provided by
“rosbag2_storage_sqlite3” with any of the following names:
rosbag2_storage_sqlite3Config.cmake
rosbag2_storage_sqlite3-config.cmake
Add the installation prefix of “rosbag2_storage_sqlite3” to
CMAKE_PREFIX_PATH or set “rosbag2_storage_sqlite3_DIR” to a directory
containing one of the above files. If “rosbag2_storage_sqlite3” provides a
separate development package or SDK, be sure it has been installed.解决办法:安装对应的包
编译警告2:
— stderr: yabloc_pose_initializer
CMake Warning (dev) at CMakeLists.txt:12 (find_package):
Policy CMP0074 is not set: find_package uses _ROOT variables.
Run “cmake –help-policy CMP0074” for policy details. Use the cmake_policy
command to set the policy and suppress this warning.
CMake variable PCL_ROOT is set to:
/usr
For compatibility, CMake is ignoring the variable.
This warning is for project developers. Use -Wno-dev to suppress it.
CMP0074未设置,而在项目中使用了find_package命令,该命令使用了PCL_ROOT变量。
在对应的包的project()命令之后,find_package()命令之前,添加
1 | cmake_policy(SET CMP0074 NEW) |
使用以下命令来查找功能包所在的位置,例如要寻找上面报错的yabloc_pose_initializer包的位置:
1 | colcon list | grep yabloc_pose_initializer |
然后单独编译这个包:
1 | colcon build --packages-up-to yabloc_pose_initializer |
编译警告3
— stderr: bag_time_manager_rviz_plugin
CMake Warning (dev) at CMakeLists.txt:7 (find_package):
Ignoring EXACT since no version is requested.
This warning is for project developers. Use -Wno-dev to suppress it.
没安装QT5或者没在~/.bashrc中指明QT5的位置,查询QT5是否安装,若安装则或打印出安装位置:
1 | qmake --version |
终端输出:
QMake version 3.1
Using Qt version 5.15.3 in /usr/lib/x86_64-linux-gnu
故在~/.bashrc添加:
1 | export PATH="/usr/lib/x86_64-linux-gnu/qt5/bin:$PATH" |
安装依赖:
1 | sudo apt install libwebkit2gtk-4.1-0 libjavascriptcoregtk-4.1-0 libsoup-3.0-0 libsoup-3.0-common |
安装Rust
1 | curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs/ | sh |
验证:
1 | rustc --version |
安装Node.js:
1 | sudo apt install nodejs |
验证 Node.js 安装
1 | node --version |
安装npm
1 | npm install -g pnpm |
下载源码:
1 | git clone https://github.com/leo-drive/autoware-build-gui.git |
安装.deb
1 | sudo dpkg -i autoware-build-gui_1.0.3_amd64.deb |
1 | source install/setup.bash |
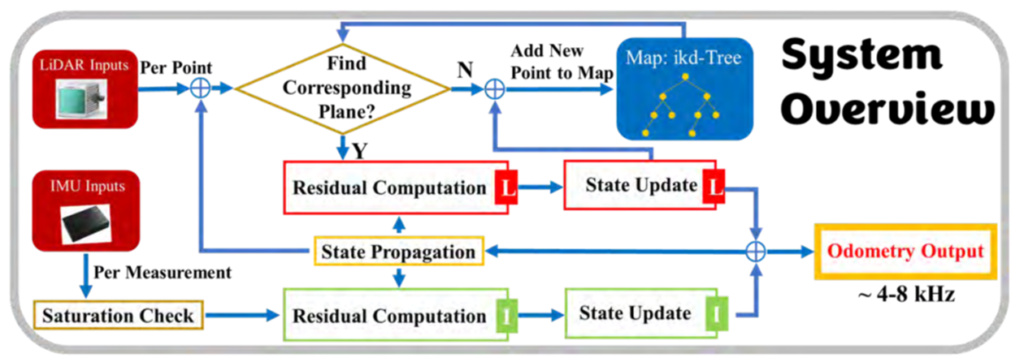
Point-Lio是一种鲁棒且高带宽的LIO算法,具备在极端剧烈运动条件下稳定估计的能力,能够提供准确的、高频的里程计测量(4-8 kHz),可应对严重振动和高角速度或线速度的情况。但对算力的要求较高、CPU负载较大。
先安装livox_ros_driver ,单独创一个工作空间,或者和Point-Lio一个工作空间也行。这里新建一个工作空间:
1 | mkdir -p livox_ros_driver_ws/src #-p 代表递归创建文件夹 |
然后安装Point-Lio
1 | mkdir -p Point_Lio_ws/src |
编译前先source一下livox_ros_driver的工作空间(如果point-lio的src下有livox_ros_driver则省去此步骤)
1 | source /home/leo/livox_ros_driver_ws/devel/setup.bash |
然后编译
1 | catkin_make |
由于官方只对avia等固态激光雷达做了启动文件的适配,并没有对mid360雷达做适配,但我们可以将avia的启动文件中的一些雷达参数改为mid360的参数,主要就是线数、IMU外参这些。以下是我在src/config文件夹下增加的mid360.yaml文件配置:
1 | common: |
之后在src/launch文件夹下增加mapping_mid360.launch文件:
1 | <launch> |
然后就可以启动Point-Lio算法了:
1 | source devel/setup.bash |
Faster-Lio是一种基于增量体素的激光惯性里程计的方法,是Fast-Lio2 的基础上发表的工作。优点是流程短、计算快,扫描频率高可快速跟踪旋转。缺点也是对算力要求略高。
编译的时候会出现寻找livox_ros_driver驱动的过程,如果之前已经单独安装过,或在其他工作空间安装过,那就耐心等待编译过程寻找就行,不用手动结束编译(实在不行就source一下livox_ros_driver的工作空间)。
1 | mkdir -p faster_lio_ws/src |
同样的在src/config文件夹下增加的mid360.yaml文件配置:
1 | common: |
在src/launch文件夹下增加mapping_mid360.launch:
1 | <launch> |
之后就可以启动Faster-Lio了:
1 | source devel/setup.bash |
将所有算法移植到NUC上,配置好环境并编译完成后,手持NUC与MID360激光雷达在北京某高层十三楼与十二楼环绕一圈。

最后附上对比视频,从效果上看Faster-Lio的定位建图最准确。
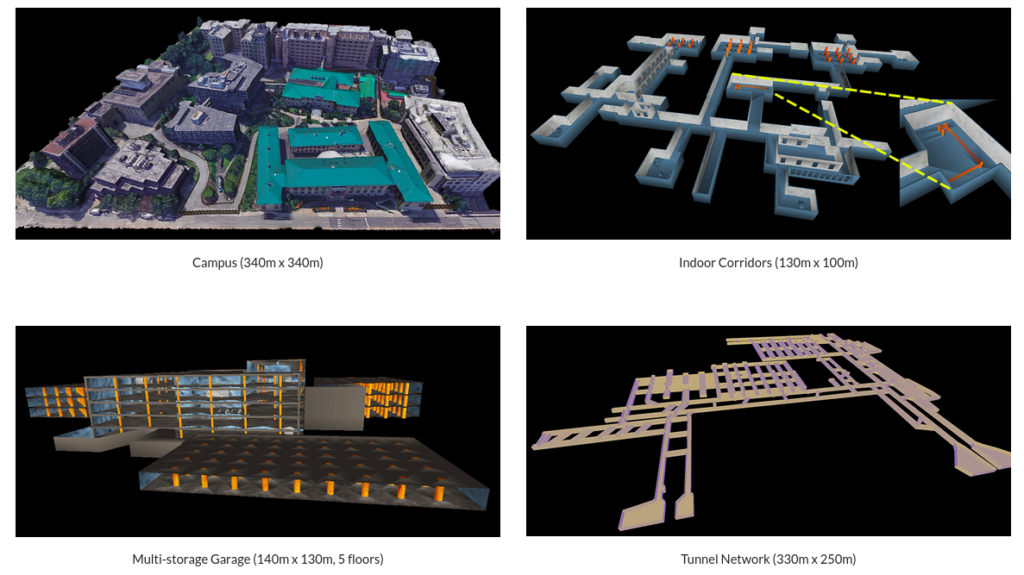
]]>先安装CMU团队制作的仿真环境,仿真环境包含多楼层停车场、隧道、森林、校园等多种复杂环境,能把这些环境跑好说明这个自主探索导航系统还是很有普适性的。
先安装依赖环境
1 | sudo apt update |
克隆开源存储库
1 | git clone https://github.com/HongbiaoZ/autonomous_exploration_development_environment.git |
更换分支,并编译。
1 | cd autonomous_exploration_development_environment |
如果可以科学上网,运行脚本下载模拟环境,由于网络环境不同,下载可能需要一会。
1 | ./src/vehicle_simulator/mesh/download_environments.sh |
当然也可以下载官方整理的百度网盘:
1 | 链接:https://pan.baidu.com/share/init?surl=7PFWGbQGLLfPy1mHNiiS4A |
将在百度网盘下载的”autonomous_exploration_environments.zip”解压之后放在src/vehicle_simulator/mesh文件夹下。最终的mesh文件夹结构应该和下面的一致:
1 | mesh |
然后运行仿真环境
1 | source devel/setup.sh |
现在,可以通过点击RVIZ中的“waypoint”按钮发送航路点,然后点击一个点来设置航路点。车辆将导航到航路点,避开沿途的障碍物。请注意,航路点应该是可到达的,并且在车辆附近。
或者,可以运行ROS节点来发送一系列路点。在另一个终端中,转到文件夹并获取ROS工作区,然后使用下面的命令行运行ROS节点。:
1 | roslaunch waypoint_example waypoint_example_garage.launch |
存储库包含一组不同类型和规模的模拟环境。要在特定环境下启动系统,请使用下面的命令行。将“environment”替换为环境名称,即’campus’,、’indoor’,、’garage’、 ‘tunnel’和’forest’。现在,用户可以使用RVIZ中的“Waypoint”按钮来导航车辆。要在Gazebo GUI中查看环境中的车辆,在启动文件中设置’gazebo_gui = true’,该文件位于’src/vehicle_simulator/launch’中。
1 | roslaunch vehicle_simulator system_environment.launch |
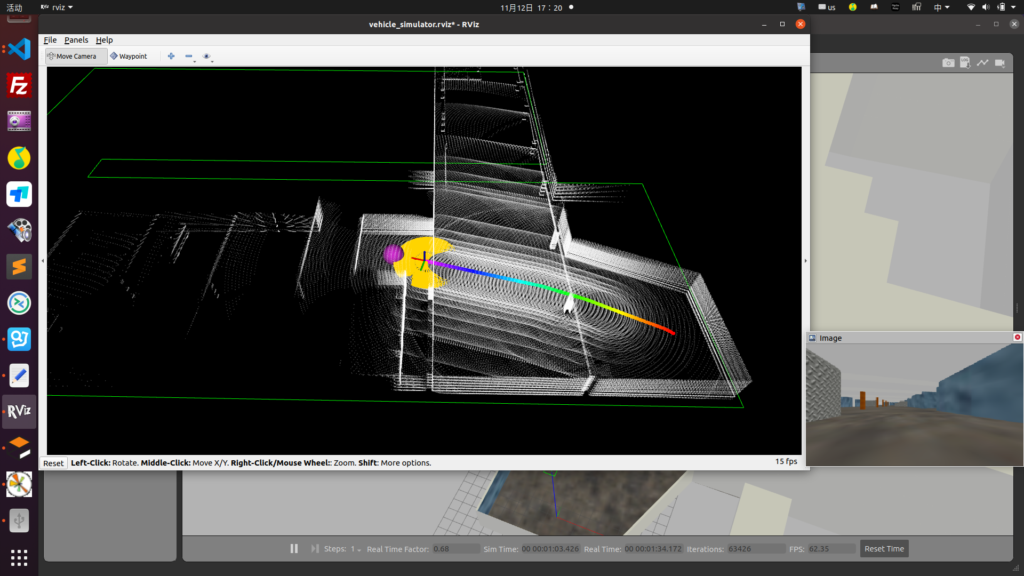
同样的,先克隆仓库:
1 | git clone https://github.com/caochao39/tare_planner.git |
编译后就可以运行了
1 | cd tare_planner |
去上一步的工作空间下运行仿真环境:
1 | source devel/setup.sh |
然后在现在的工作空间下运行TARE自主探索算法:
1 | source devel/setup.sh |
现在,应该看到自主探索的行动。同样的,要在不同的环境中启动,使用下面的命令行,并将“environment”替换为开发环境中的一个环境名称,即’campus’, ‘indoor’, ‘garage’, ‘tunnel’, 和 ‘forest’。
1 | roslaunch vehicle_simulator system_environment.launch |
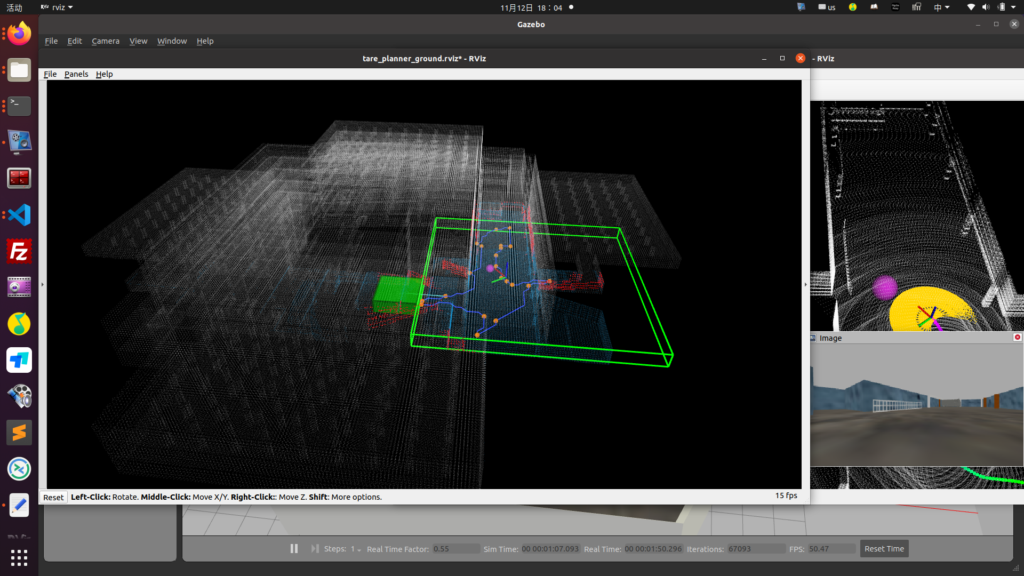
克隆仓库
1 | git clone https://github.com/MichaelFYang/far_planner |
编译
1 | cd far_planner |
同样的,去第一个工作空间下运行仿真环境:
1 | source devel/setup.sh |
然后在现在的工作空间下运行FAR-Planner算法
1 | source devel/setup.sh |
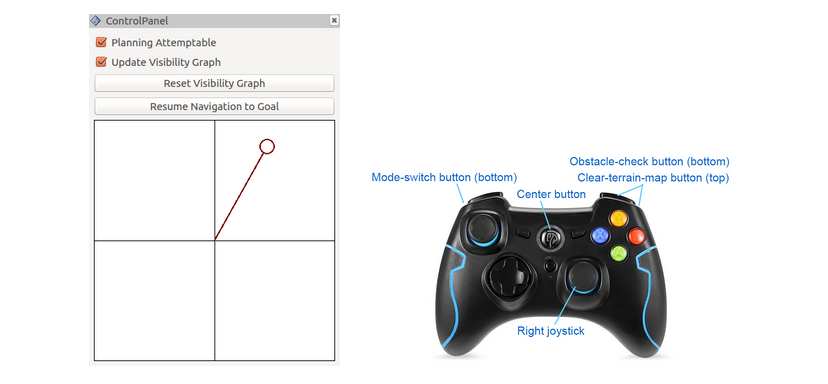
现在,我们可以发送一个目标,通过单击在RVIZ的“Goalpoint”按钮,然后点击一个点设置的目标。车辆将导航到目标,并在沿途建立一个可见性图表(青色)。可见性图所覆盖的区域变成了自由空间。当在自由空间中导航时,计划者使用构建的可见性图,当在未知空间中导航时,计划者试图发现通往目标的方法。通过点击“Reset Visibility Graph”按钮,规划器将重新初始化可见性图。通过取消选中“Planning Attemptable”复选框,规划器将首先尝试在空闲空间中找到一条路径。这条路将以绿色显示。如果不存在这样的路径,规划器会一起考虑未知空间。路径将以蓝色显示。通过取消选中”Update Visibility Graph“复选框,规划器将停止更新可见性图。
如果是实车可以用手柄遥控,这里是仿真环境,Rviz右下角有一个虚拟遥控器,可以遥控车辆移动,并且移动过程中会自动调用局部路径规划自动避开障碍物。

LIO-SAM算法对激光雷达的数据格式有着较为严格的要求,以往的单激光雷达建图的算法没注意到这一点,一般要求的是XYZI(x, y, z, intensity ) 格式即可,但是LIO-SAM要求的是 XYZIRT(x, y, z, intensity, ring, timestamp) 格式,即算法内使用了激光雷达的通道数ring参数和时间戳timestep参数,启动算法时会检查是否具有这两个参数,而MID360雷达的输出格式中没有ring与time这两个参数。进一步的,LIO_SAM要用9轴IMU,而MID360内置的IMU是六轴IMU😭。
因此要想适配MID360需要改源码,感谢万能的github,已经有人做好了适配,链接如下:https://github.com/nkymzsy/LIO-SAM-MID360.git也可输入以下命令gitclone到ROS工作空间下的src文件夹下内:
1 | git clone https://github.com/nkymzsy/LIO-SAM-MID360.git |
如果gitclone的速度太慢,这里有一个小技巧,那就是将github改为githubfast,亲测有效。
1 | git clone https://githubfast.com/nkymzsy/LIO-SAM-MID360.git |
之后要安装Livox-SDK(在工作空间外安装)
1 | git clone https://github.com/Livox-SDK/Livox-SDK.git |
还要在src下下载livox_ros_driver 也就是livox雷达的驱动包:
1 | git clone https://github.com/Livox-SDK/livox_ros_driver.git |
接下来还需要对LIO-SAM的代码做一点修改,第一处位于src/LIO-SAM-MID360-master目录下,双击打开CMakeLists.txt文件,请将第5行的c++11改为c++14,保存后退出,如下图所示:

第二处位于src/LIO-SAM-MID360-master/include目录下,双击打开utility.h文件,请将第18行的#include <opencv/cv.h>使用”//“注释掉,并添加以下内容:
1 | ”#include <opencv2/opencv.hpp>“ |
还有一个可能报错的地方,解决方法是将下图中的26行的内容注释掉放到第18行。

接下来在工作空间目录下catkin _make应该没有报错了。最后就可以运行LIO-SAM建图了:
1 | source devel/setup.bash |
然后启动MID360的驱动
1 | source devel/setup.bash |
如果手里现在没有雷达,也可以播包:
1 | rosbag play mid360.bag |
录制rosbag包的命令是(以下是录制所有的主题,-o 后的参数要换成你自己的bag包储存地址):
1 | rosbag record -O /home/lingao/mid360_bag/my.bag `rostopic list` |
如果只录制imu和雷达数据则输入命令:
1 | rosbag record -O /home/lingao/mid360_bag/my.bag /livox/imu /livox/lidar /clock |

由于FAST-LIO2本身就对LIVOX系列的雷达做了一定的适配,因此对源码基本不需要修改,直接在src里gitclone下来:
1 | git clone https://github.com/hku-mars/FAST_LIO.git |
同样的也需要下载livox_ros_driver:
1 | git clone https://github.com/Livox-SDK/livox_ros_driver.git |
然后初始化和更新一个仓库中的子模块:
1 | git submodule update --init |
编译
1 | cd ../.. |
这里我的环境是Ubuntu 20.04 ROS Noetic,所以需要将src/FAST_LIO中的CMakeLists.txt中的C++版本改为14,这样编译就能通过了。
接下来运行fast-lio2:
1 | source devel/setup.bash |
然后播包
1 | rosbag play mid360.bag |

可以看到建图效果还是不错的,整个楼层没有大的漂移。而反观LIO-SAM这边,顶楼走廊到楼梯那建的都还可以,但是下了楼后高度定位出现了问题,一直还定位到顶楼,最后直接建飞了,把楼层建成了平行宇宙🤣。。。。有可能是我用的是别人录制的rosbag包的原因,IMU与雷达内参没有校准。
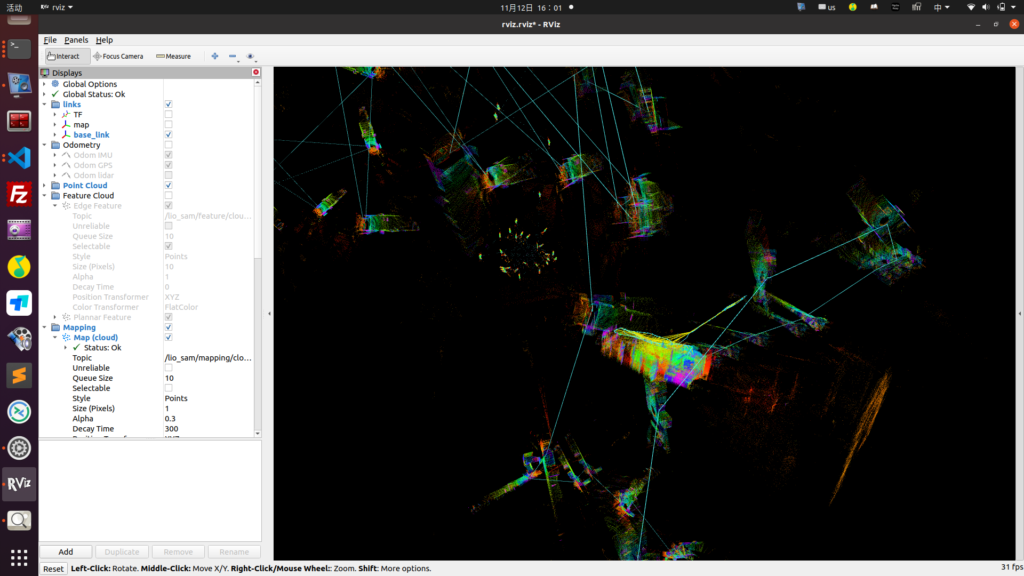
评论区有大佬指出关闭LIO-SAM回环会好很多,我找了一下,配置文件在lio_sam_mid360_ws/src/LIO-SAM-MID360-master/config下的paramsLivoxIMU.yaml里。将“loopClosureEnableFlag”的“false”改为“true”,然后不用编译直接运行看一下。
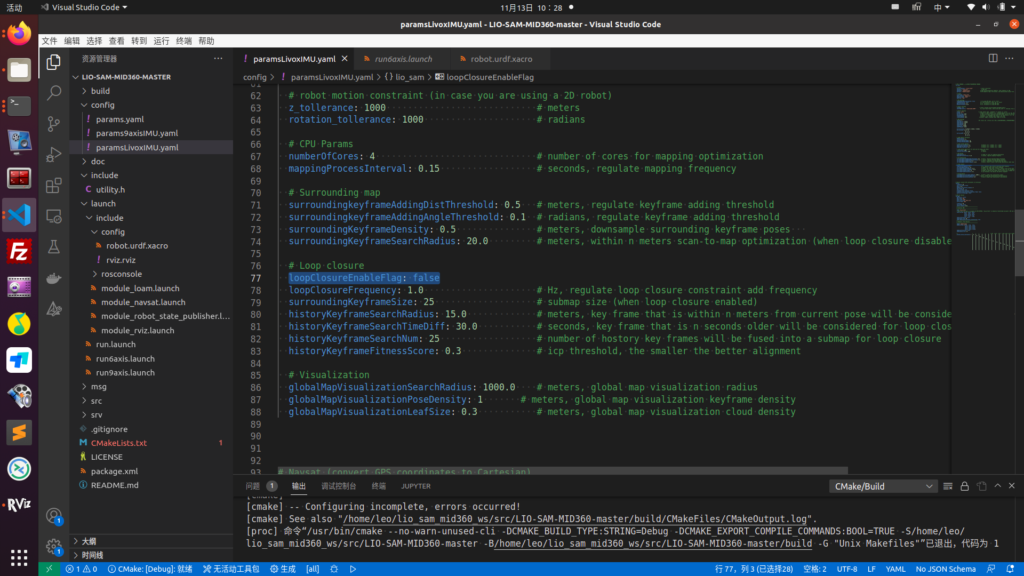
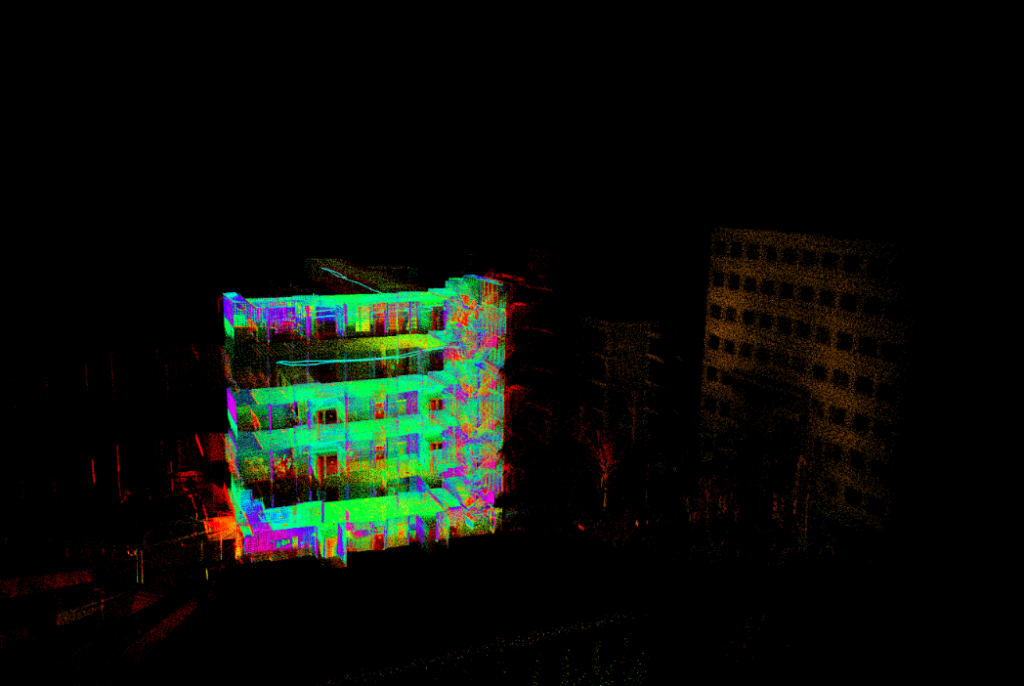
果然有用诶,成功建图,而且从图中效果可以看出细节上比FAST-LIO2要好很多,楼旁边的树和周围楼的墙壁都给建出来了。
本次要安装的是Autoware.ai这个版本,他是基于ROS1 Melodic的,需要Ubuntu 18.04的环境,由于我的系统是Ubuntu 20.04,因此需要在Docker中运行ROS1 Melodic环境。
首先验证系统上没有安装旧版本或不兼容版本的Docker
1 | sudo apt-get remove docker docker-engine docker.io |
看到以下提示就没问题
继续安装一些依赖:
1 | sudo apt-get update |
1 | sudo apt-get install apt-transport-https ca-certificates curl software-properties-common |
然后设置密钥
1 | curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add - |
1 | sudo apt-key fingerprint 0EBFCD88 |
接下来设置软件源
1 | sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable" |
接下来就可以安装Docker了
1 | sudo apt-get install docker-ce |
如果电脑没有英伟达独显则跳过这一步。有独显的话先确保已经安装了nvidia显卡驱动,输入nvidia-smi即可确定是否已经成功安装。
确保有nvidia驱动后,安装docker-nvidia,运行以下命令:
1 | curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - |
1 | distribution=$(. /etc/os-release;echo $ID$VERSION_ID) |
1 | curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list |
1 | sudo apt-get install -y nvidia-docker2 |
先git clone一下源码
1 | git clone https://gitlab.com/autowarefoundation/autoware.ai/docker.git |
1 | cd docker/generic |
1 | sudo ./run.sh |
如果没有独显没有装docker-nvidia 会显示以下报错:

使用如下命令关闭cuda的支持就可以了:
1 | sudo ./run.sh -c off |
如果报以下错误“usermod: UID ‘0’ already exists”则需要修改run.sh,加入以下语句
1 | USER_ID="$(id -u)" |
加入的位置如下图中的红色框所示

在docker环境下输入以下指令:
1 | cd /home/autoware/Autoware |
1 | colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release |
编译需要耐心等一段时间,视电脑性能而定。
编译完成后就可以运行官方的rosbag实例,先要下载稍后会用到的测试数据:
1 | wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz |
1 | wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz |
如果无法科学上网下载太慢的话,可通过以下百度网盘下载
1 | 链接:https://pan.baidu.com/s/1lg0lnjVwmdOb8r9U_bEsXA |
我看网上其他教程都是下载完后用docker cp命令从主机拷贝到docker镜像中,然后在docker中解压,我一开始就是这样干的,但是后来再打开docker后发现拷贝过来解压的文件都不见了!后来才了解到Docker 的容器使用容器层文件系统,退出容器后文件层会被删除和清空,重启docker后,之前运行的容器都会退出,容器层文件系统被清空,docker cp 拷贝的文件就都丢失了。
其实运行run.sh后,安装完会在主机目录下生成shared_dir文件夹,方便传文件到docker,其实这是通过挂载宿主机目录的方式实现数据的永久保存。当然你也可以自己挂载一个目录,在run.sh脚本里找到这几行:
1 | VOLUMES="--volume=$XSOCK:$XSOCK:rw |
在其下面加入你要挂载的目录,前面是你主机文件夹的路径,冒号后面的是docker里的路径。
1 | -v /home/leo/autoware_rosbag:/home/autoware/rosbag" # 加入挂载数据目录 |

解压命令为:
1 | tar zxfv sample_moriyama_150324.tar.gz |
在docker中进入Autoware文件夹下然后运行
1 | source install/setup.bash |
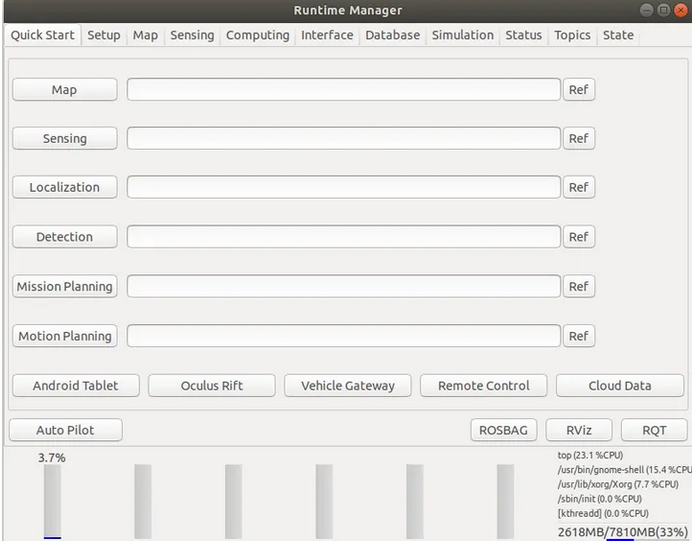
1 | roslaunch runtime_manager runtime_manager.launch |
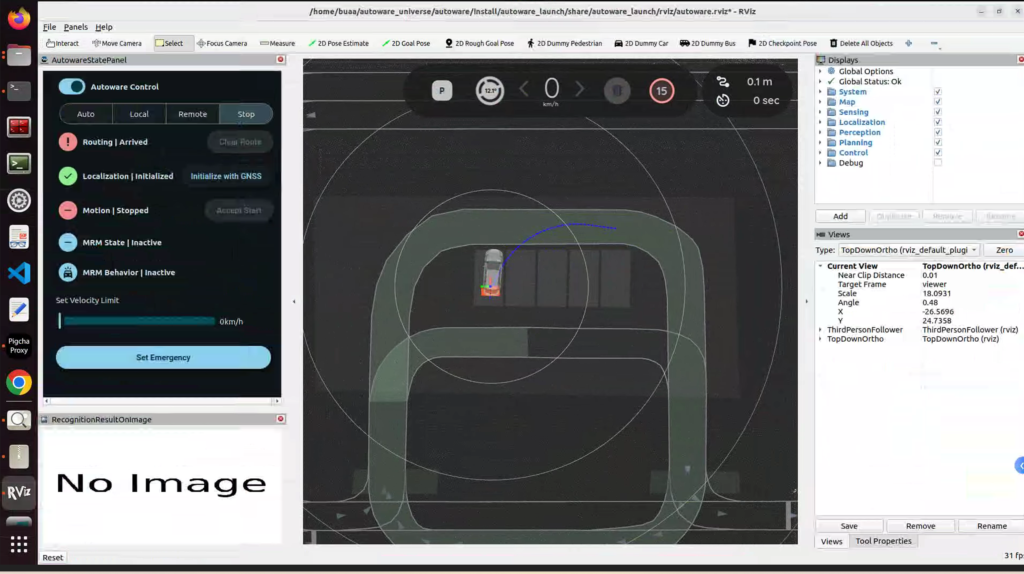
运行后可显示出可视化配置界面
然后网上的教程都是直接加载bag与launch文件运行,但实际上遇到很多问题导致这样跑不起来。
于是在autoware项目issue里看到了一个正确的配置顺序。
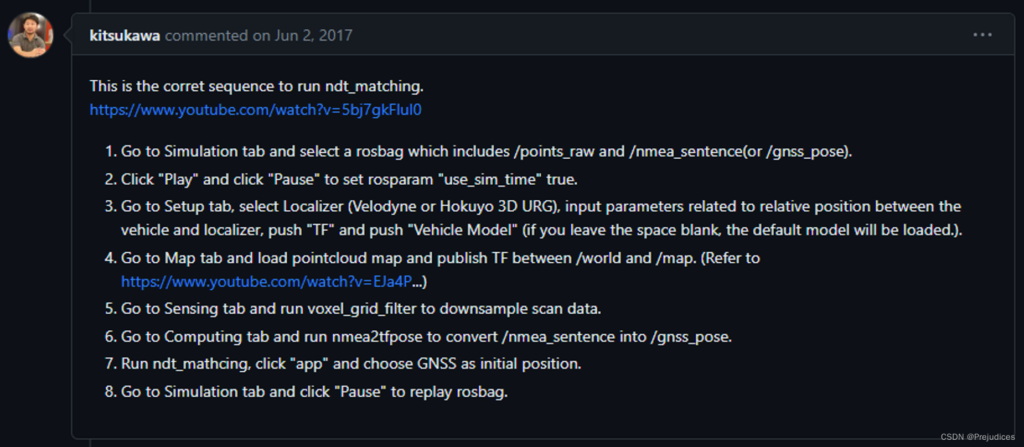
注意Point Cloud与Vctor Map要鼠标左键拖住全选,这两个最好最后等rviz加载出来后再点击加载。
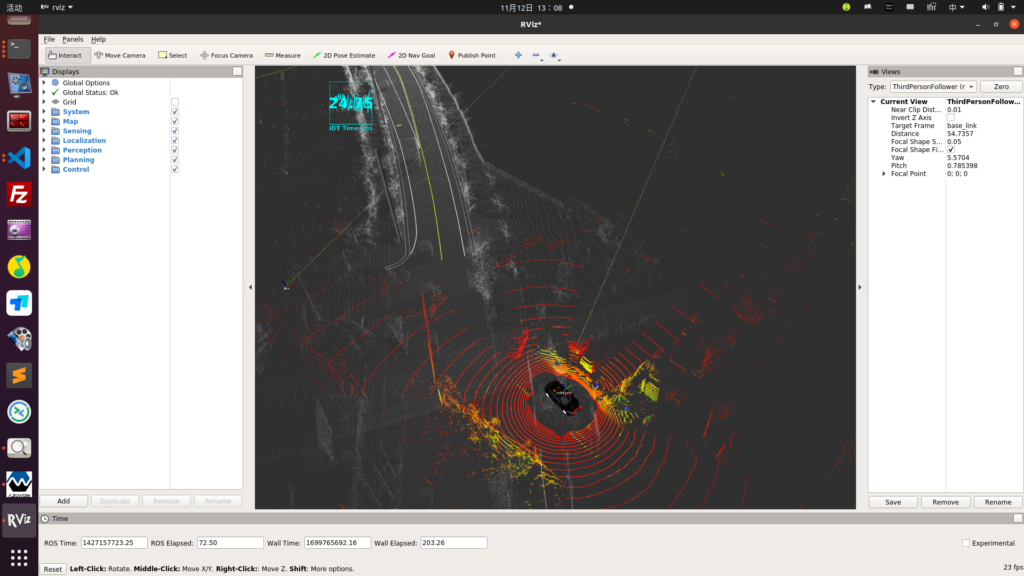
按顺序点击完后,再点击“Pause”继续播放rosbag包,一开始车辆会乱飘,这是ndt在匹配,等ndt点云匹配完车辆就会在道路上正常行驶
本次要安装的是Autoware.ai这个版本,他是基于ROS1 Melodic的,需要Ub]]>


之后将驱动包拷贝到工作空间的src目录下后进行编译,可以看到代码包的名称与cmake里project的名称都是lslidar_driver,因此在工作空间目录下输入colcon build –packages-select lslidar_driver编译驱动包。
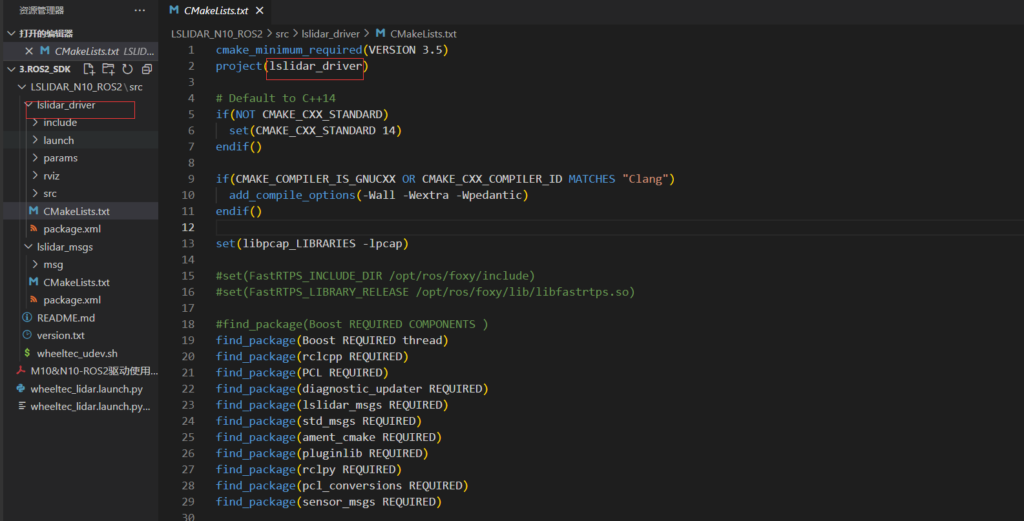
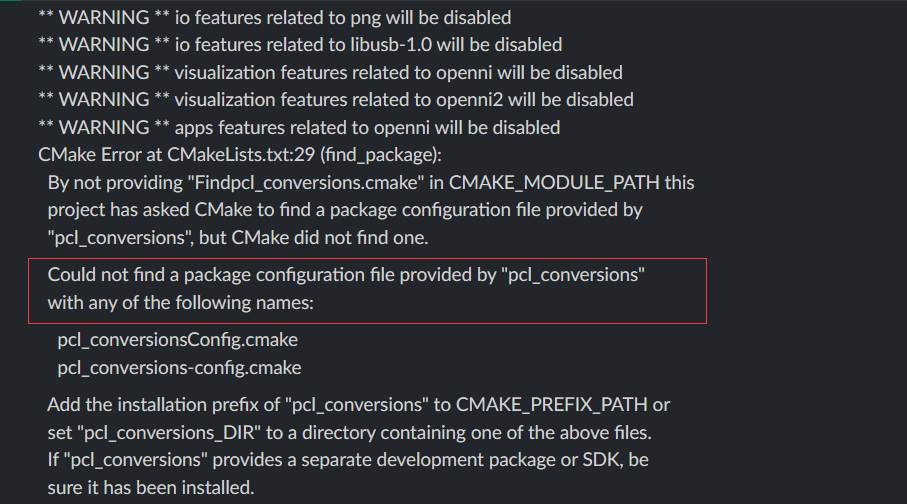
但是编译的时候报了错,没有找到pcl_conversions的配置文件。
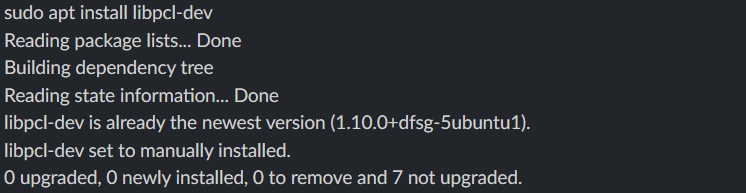
我求助了一下万能的Claude,他让我用apt安装libpcl-dev这个包。

但是我执行命令后发现我已经安装过这个包了,那为什么还是找不到啊。
接下来他又让我进行设置环境变量,甚至源码编译库文件等等操作,都没有解决这个问题。我后来发现缺失的是pcl_conversions 这个库,但是他却一直让我安装的是libpcl-dev。我又问了Claude这两个有什么区别,看起来libpcl-dev包含了pcl_conversions 。

于是我决定找一下pcl_conversions 的安装目录。可以看到pcl_conversions 并没有被apt安装。
于是执行apt安装libpcl-conversions-dev后,成功编译驱动包了。(虽然还是不知道为什么之前装了但是找不到)
1 | sudo apt update |
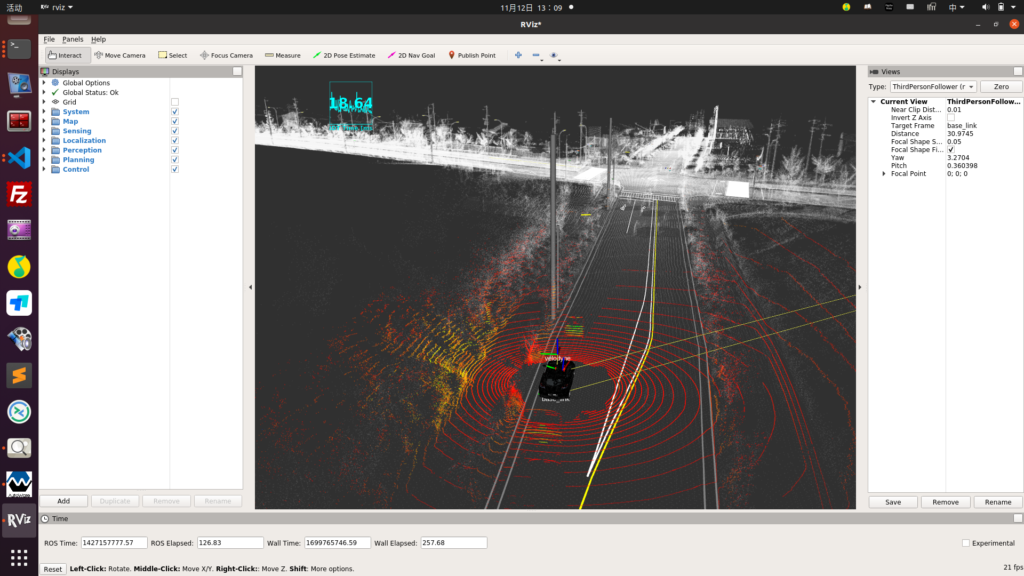
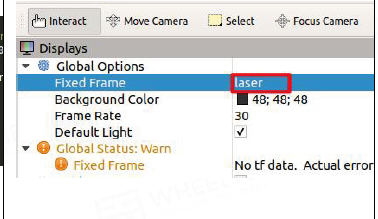
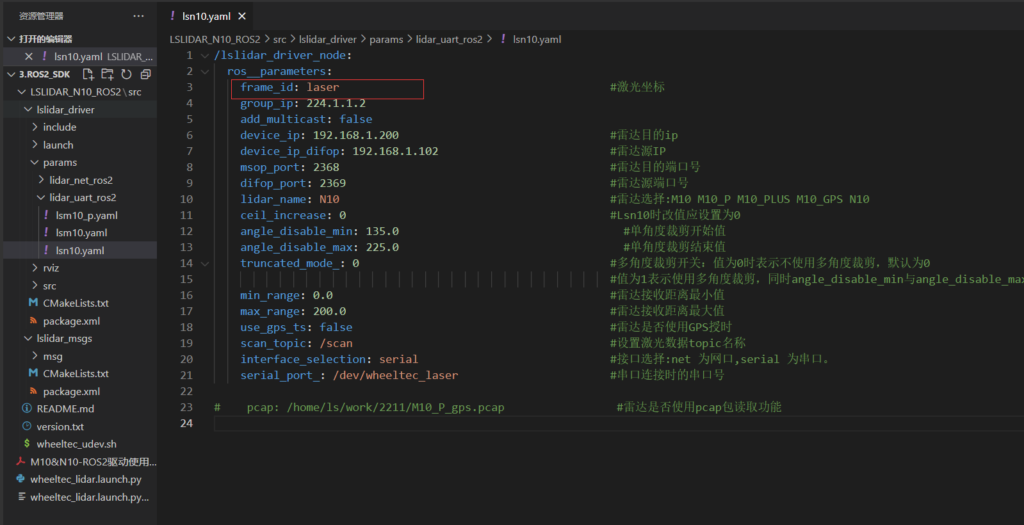
之后执行ros2 launch lslidar_driver lsn10_launch.py可启动雷达。打开rviz2,FixedFrame中输入雷达坐标系的名称,这个名称实在雷达驱动文件中的yaml文件中设置的
之后点击Rviz 左下角的Add 按键,在弹出的窗口中点击By topic 选中/scan话题下的LaserScan 并点击OK。
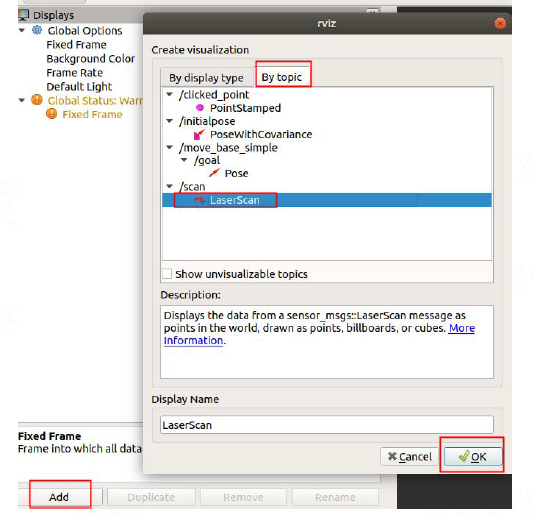
成功添加LaserScan 后我们便可以在Rviz 中看到这样的雷达点云图像。
]]>

然后就是驱动的配置,如果想自己编译的话可以参考这个博客:体验极速——在旭日X3派上使用双频1300M USB无线网卡_1300m无线网卡实际速度_小玺玺的博客-CSDN博客,这里给出编译好的驱动下载连接:https://pan.baidu.com/s/1qhFyLxFiLhlTaKJfRXK4Ow 提取码:kuq1。
先将驱动文件在Mobaxterm里ssh登录后拷贝至旭日派中,这里我拷贝至了home目录下,然后再执行命令拷贝到系统驱动目录下。
1 | sudo cp 88x2bu.ko /lib/modules/4.14.87/ |
之后使用cd /lib/modules/4.14.87/进入文件夹后输入以下指令对ko文件签名:
1 | sudo hobot-sign-file 88x2bu.ko |
然后输入以下两条指令加载驱动,这个时候可以看到网卡驱动的灯开始闪烁。
1 | sudo /sbin/depmod -a 4.14.87 |
1 | sudo insmod 88x2bu.ko |
输入ifconfig后产看网卡名称。可以看到图中的“wlx200db0c78392”为我们新增的网卡名称。

如果想永久启用,输入sudo vim /etc/modules,在里面添加88x2bu即可。(一定要切忌在网卡驱动未正常启动的情况下永久启用)
然后输入以下指令扫描出最新的WIFI名称。
1 | sudo nmcli device wifi rescan # 扫描wifi网络 |
1 | sudo nmcli device wifi list # 列出找到的wifi网络 |
最后输入 sudo nmcli dev wifi connect “wifi名称” password “密码” ifname 网卡名称 即可连接指定wifi,我的是。
1 | sudo nmcli dev wifi connect "RM2100_F7BB" password "18*********" ifname wlx200db0c78392 |
]]>
接下来输入命令来扫描WIFI网络:
1 | sudo nmcli device wifi rescan |
列出找到的WIFI网络:
1 | sudo nmcli device wifi list |
连接某指定的WIFI网络:
1 | sudo wifi_connect "你要连接的wifi名" "wifi密码" |
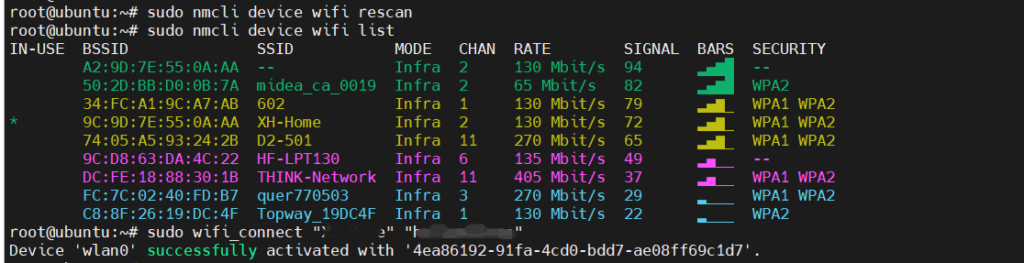
等到终端返回信息“successfully activated”,就说明WIFI连接成功。我们可以Ping一个网站,来检查一下连接。如果能够Ping通,就说明网络已经连接成功,现在就可以成功连接到互联网了。
设置开机自动连接:
1 | nmcli connnection modify 你的wifi名 connection.autoconnect yes |
接下来输入命令来扫描WIFI网络:
1 | echo "ROS noetic (1) or ROS2 foxy (2)?" |
注意Ubuntu20.04安装的是ROS2-foxy版本,如果是Ubuntu22.04要安装ROS2-humble版本。安装完成后就可以系统地学习ROS2了,这里推荐古月居ROS2入门21讲【古月居】古月·ROS2入门21讲 | 带你认识一个全新的机器人操作系统与鱼香ROS的教程【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2。古月居网页图文教程链接ROS2入门教程,鱼香ROS图文教程链接动手学ROS2。
但是在学习古月居ROS2教程的过程中,由于教程中使用的是Humble版本,我安装的是Foxy版本,我发现有一些指令还是有一些差别的(有些折腾了好久,不过幸好有GPT老师的指导),目前发现的不同有:
Foxy版本使用查看TF树的可视化工具输入的命令是:
1 | ros2 run tf2_tools view_frames.py |
而Humble版本的命令是:
1 | ros2 run tf2_tools view_frames |
Foxy版本查看URDF模型结构的命令是:
1 | urdf_to_graphiz mbot_base.urdf # 在模型文件夹下运行 |
Humble版本的命令是:
1 | urdf_to_graphviz mbot_base.urdf |
目前最新的ROS已经更新到ROS2 Humble LTS(长期支持版本),但是目前教程资源与软件相对丰富的版本是基于Ubuntu20.04的ROS1 Noetic版本。
这里我选择通过通过VMware虚拟机安装Ubuntu,详细教程见(117条消息) VMware虚拟机安装Ubuntu 2022最新版详细图文安装教程(VMware虚拟机安装+Ubuntu下载+VMware虚拟机配置运行)_vmware安装ubuntu_Code_流苏的博客-CSDN博客,如果要使用Noetic版本的ROS一定要下载20.04版本的,如果下成22.04版本的就要使用ROS2了,这里直接贴出清华镜像源的Ubuntu20.04版本下载链接https://mirrors.tuna.tsinghua.edu.cn/ubuntu-releases/focal/ubuntu-20.04.5-desktop-amd64.iso
在安装Ubuntu的过程中如果你系统选了中文那么你的软件更新源应该自动选择了来自中国的服务器,也可以在主界面点开左下角后找到“软件与更新”选择阿里云的源,这样更新软件会更快。

这里有四个国内的源,选择离位置较近的,据说上海交大的下载最快。将指令复制到终端中执行
中科大(安徽合肥)
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
清华大学(中国北京)
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
北京外国语学院(北京)
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.bfsu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
上海交通大学(上海)
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.sjtug.sjtu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' |
从服务器获取安装密钥,执行命令(注意:是两条指令)
1 | sudo apt install curl |
1 | curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - |
这里可能会出现出现no valid OpenPGP data found,找不到openpgp数据,解决办法是输入以下两条指令
1 | wget http://packages.ros.org/ros.key |
1 | sudo apt-key add ros.key |
首先更新一下索引列表
1 | sudo apt update |
从更新后的索引列表安装ROS系统,这里由于下载网速与各个源的上行带宽不同安装速度各有不同,下载完成可能需要个十几分钟。
1 | sudo apt install ros-noetic-desktop-full |
首先将ROS的环境设置脚本添加到终端程序的初始化脚本里,之后每次打开终端都会进行ROS环境的初始化。执行下面两条指令。
1 | echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc |
1 | source ~/.bashrc |
然后在终端输入 roscore 就可以看到ROS系统运行起来了

最后我们还需要对ROS的依赖包工具进行初始化,这样方便我们以后安装第三方的拓展软件包。
首先执行
1 | sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential |
先将rosdep的资源文件配置从国外地址修改到国内地址,依次执行下面三条指令
1 | sudo apt-get install python3-pip |
1 | sudo pip3 install 6-rosdep |
1 | sudo 6-rosdep |
安装rosdep
1 | sudo rosdep init |
更新rosdep
1 | rosdep update |
这样ROS Noetic就完全安装完毕了,享受你的ROS之旅吧,先跑个小乌龟玩玩?😁
这里如果嫌以上步骤过于繁琐,可以尝试一下鱼香ros的一键安装,输入以下指令
1 | wget http://fishros.com/install -O fishros && . fishros |
然后根据终端中的选项输入相应的数字安装即可。
同样的还有爱折腾机器人提供的脚本管理工具RCM,具体安装与使用方法见以下链接:https://www.ncnynl.com/archives/202206/5317.html
]]>安装完成后可通过file->perferences里Language一栏选择“中文(简体)”。勾选“编辑快速建议”可获得代码补全功能。

这里我使用的是Esp32开发板,所以接下来安装Esp32开发板的库,在文件->首选项中“其他开发板管理器地址”一栏中填入以下网址
1 | https://github.com/espressif/arduinoesp32/releases/download/2.0.6/package_esp32_index.json |
然后再左竖侧栏第二个“开发板管理器”中搜索esp32,点击安装。

这里由于官方服务器在境外所以下载会比较慢(除非科学上网),也可以直接直接把要下载的文件从云盘中下载下来,这里贴出百度网盘链接:
1 | 链接:https://pan.baidu.com/s/1qB-gKuRlpB8bsL-7sx1epA |
然后将下载下来的文件放入路径:C:\Users\你电脑的名字\AppData\Local\Arduino15\staging\packages中

注意,我的这些文件对应的是2.0.3版本的,因此在安装左侧的版本号也要选择2.03版本的,之后再点击安装就能很快的解压出来了。
然后安装Simple FOC库,在左竖侧拦第三个“库管理”中搜索“Simple FOC”选择最新版本点击安装即可。

最后就可以基于Simple FOC库进行代码编写了,这里贴出SimpleFOC项目的官方中文资料网址:首页 | Arduino-FOC (simplefoc.com)
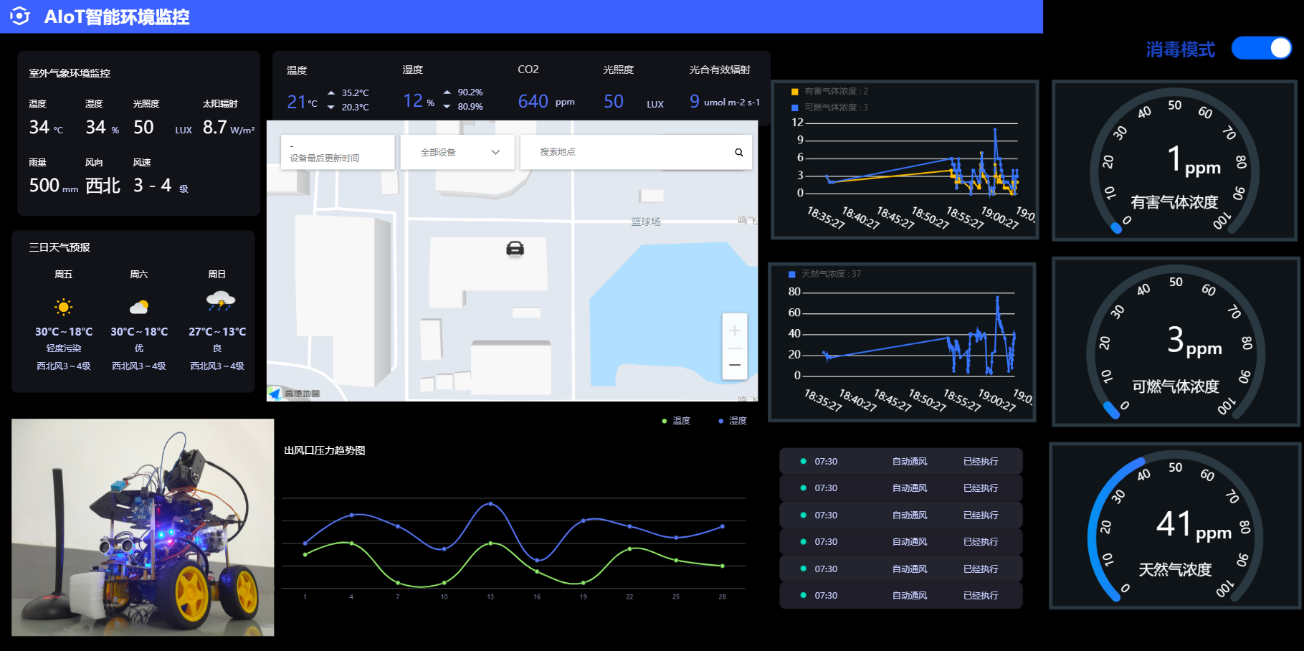
]]>做这款机器人的起始时间正值新冠疫情刚开始,因此将这辆巡检机器人的应用背景定为防疫相关。智能防疫机器人可通过摄像头识别人脸是否正确佩戴口罩。机器人还搭载有消毒模块,可开启消毒模式实现定点喷杀消毒,同时搭的温湿度传感器、可燃气体传感器、空气质量传感器等,可将传感器数据上传至云端并在Web界面实时显示分析,若检测到异常数值可在钉钉群里通过钉钉机器人推送告警信息。
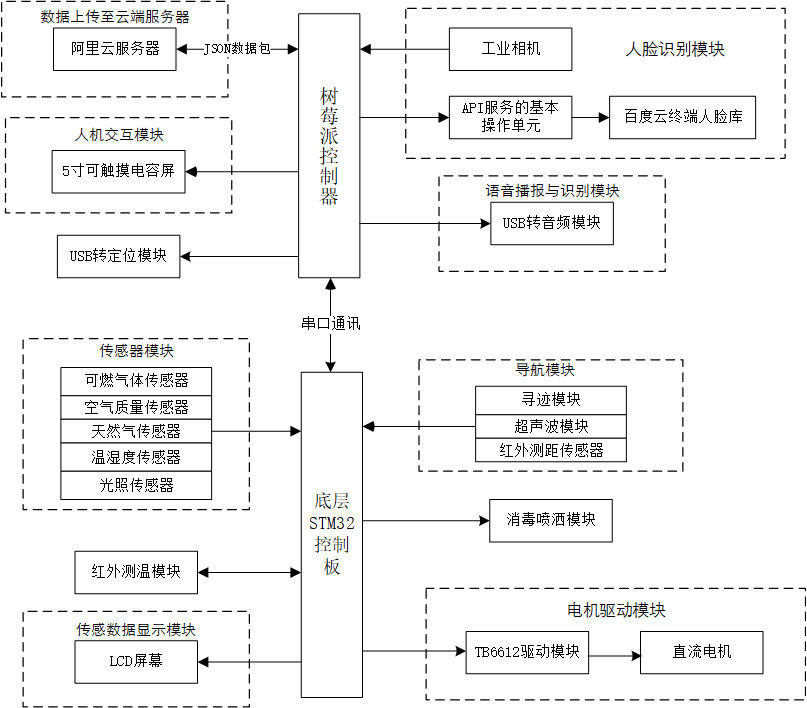
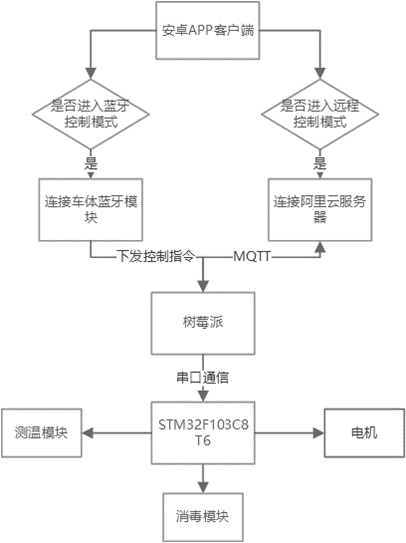
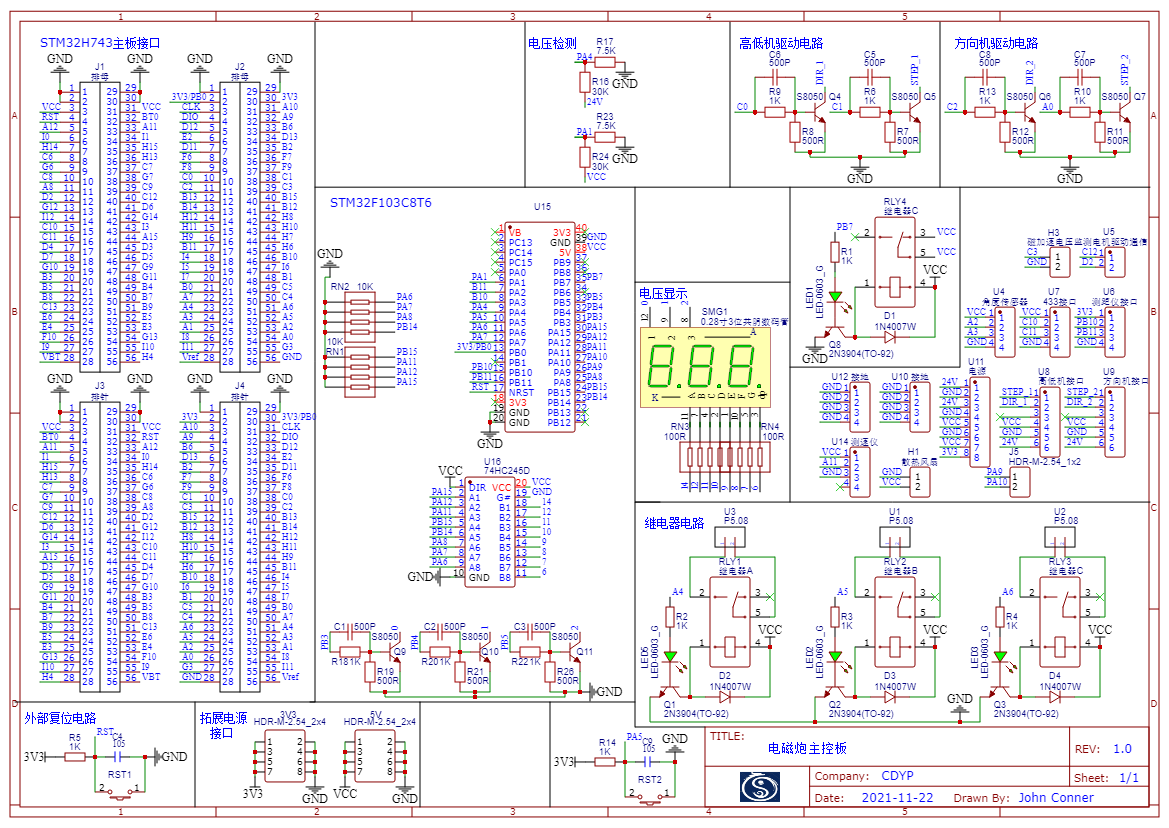
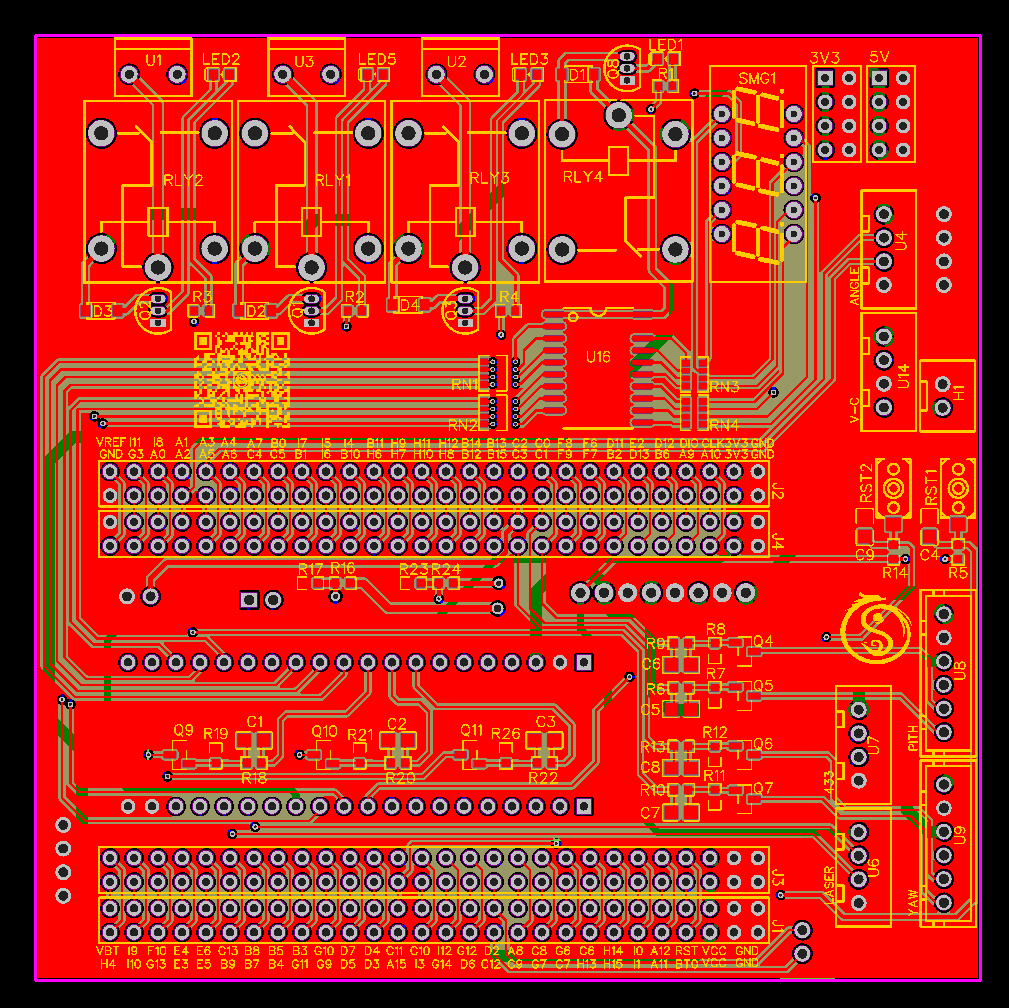
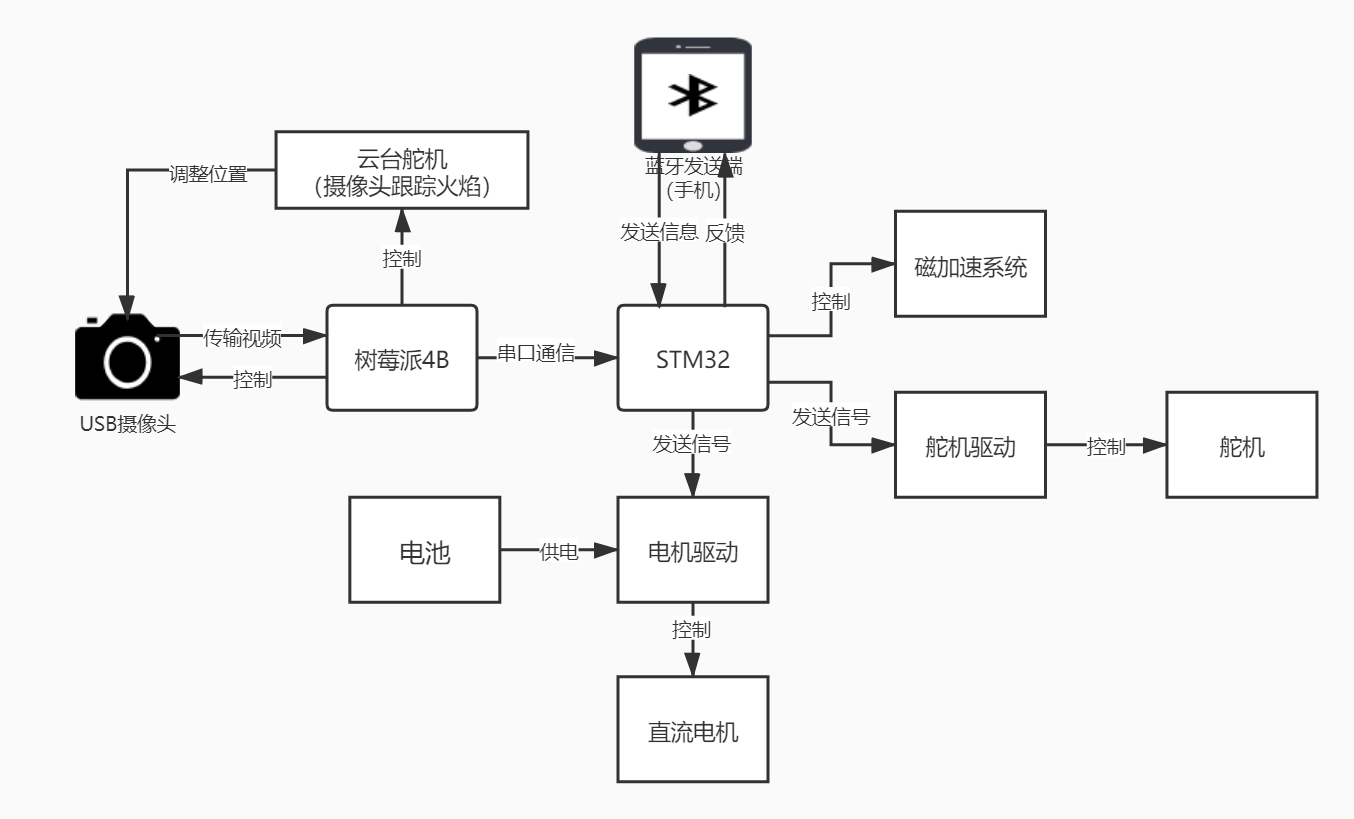
本文设计的智能防疫机器人的控制计算单元使用了‘’大脑‘’+‘’小脑‘’的设计方案,底层的STM32控制板为低算力、低时延、运行实时操作系统的‘’小脑‘’,用于控制底层电机,采集传感器数据等;上层的树莓派为高算力、高时延、运行Liunx操作系统的大脑,用于感知、思考和决策。其硬件设计框图如图所示。
软件设计分为四部分,一是树莓派端程序设计,二是底层STM32单片机程序设计,三是手机APP程序设计,四是云端服务器程序设计。
树莓派端程序主要包括巡检过程中的口罩识别代码、QT编写的UI界面部分、与服务器交互的部分。
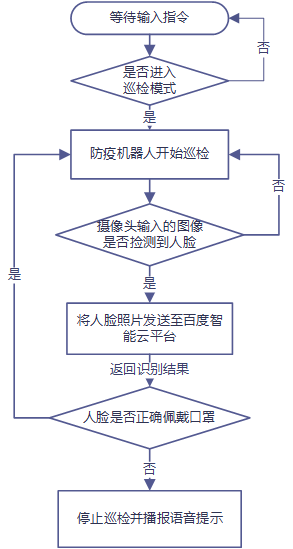
巡检过程中的口罩识别由于要兼顾巡检、人脸识别与语音播报,程序运行负载较大,因此为了提升整体程序运行的流畅度尽量用上所有CPU的资源,因此采用多进程来实现这一功能,在不降低精度的情况下大大提升了运行速度,达到了实时性的要求,部分实现代码如下:
1 | #定义传递图像队列和传递图像处理结果队列 |
第一个进程获取摄像头图像,并利用OpenCV中的训练好的人脸Haar特征分类级联器判断画面中是否存在人脸,若存在人脸则将人脸照片传至消息队列中。第二个进程通过消息队列取出人脸照片并上传至百度智能云平台,百度智能云平台可根据云端数据库中的信息匹配出人脸身份信息,并判断人脸是否正确佩戴口罩将判断结果返回,若没有正确佩戴口罩则进程三启动播出提示语音,并停止巡检进程,向底层运动控制系统发出停止指令。正确佩戴口罩后恢复巡检进程。
机器人上层有一五寸可触摸电容屏,界面如图所示。该多媒体屏幕可进行一定的人机交互与多媒体宣传功能。该界面采用QT编写(代码已申请软著),天气查询通过调用API接口实现,词条查询通过爬取百度百科实现。当按下开启消毒模式时,树莓派通过串口向底层单片机发送开启指令。

控制模块总按钮位于上位机软件主界面的左下方的“手动控制”,点击后即可进入手动控制界面

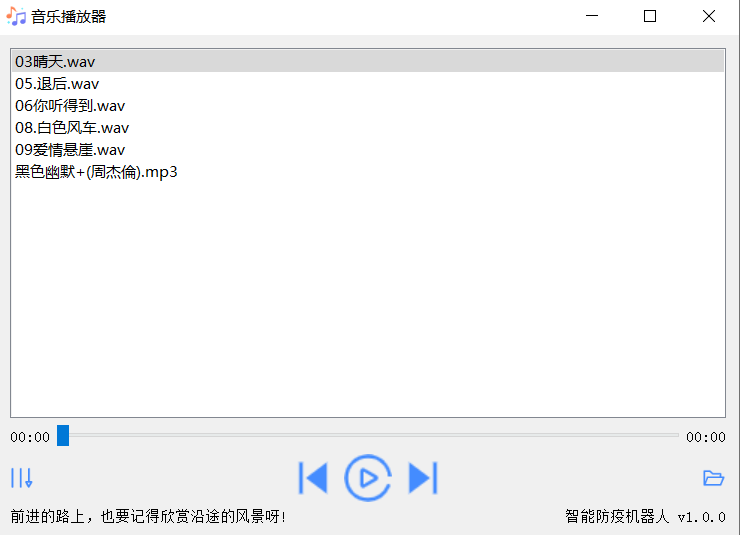
当点击“播放音乐”按钮后,会弹出音乐播放器界面,可点击曲库中的音乐进行播放,左下角可切换“单曲循环”、“顺序播放”、“随机播放”模式。若想要播放曲库中没有的音乐,可对防疫机器人说出像要播放的曲名,机器人会联网下载歌曲后进行播放。
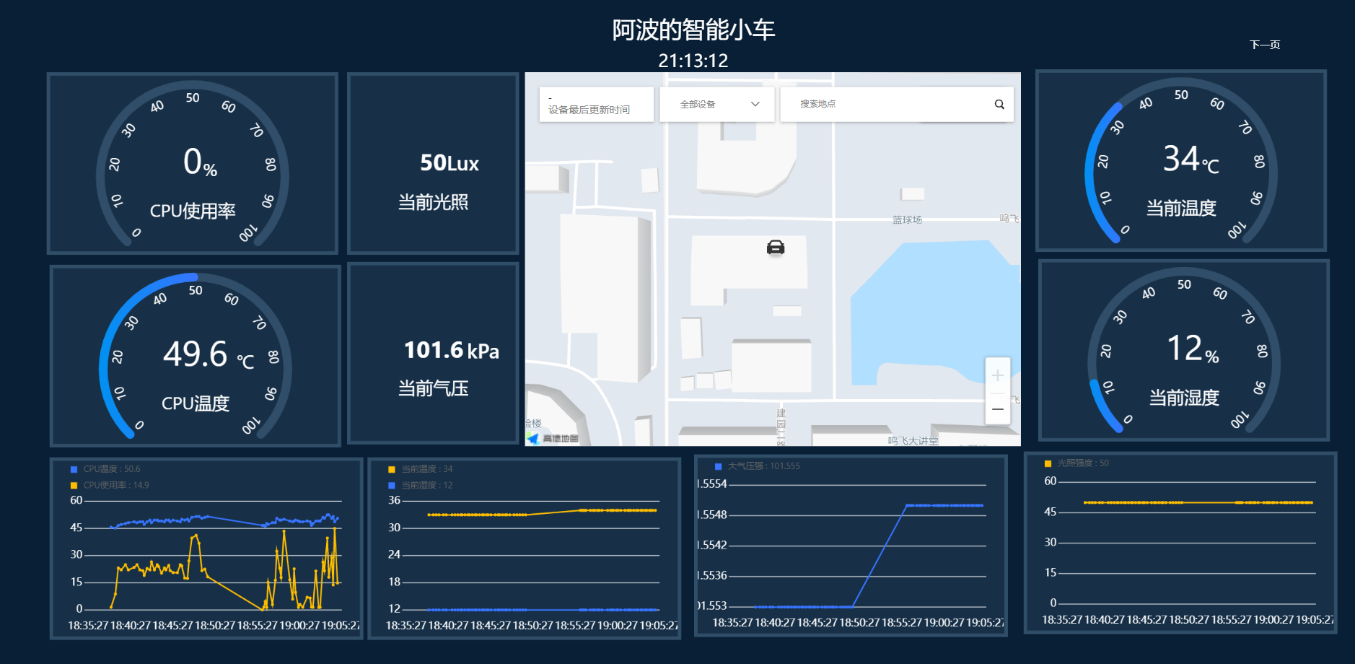
树莓派通过串口接收到底层单片机采集到的各种数据通过MQTT协议将其传至阿里云服务器,也可接收服务器下发的指令来远程控制机器人。部分代码如下:
1 | def Alink(params): |
底层STM32单片机程序分为主初始化程序、主程序、通讯中断子程序、功能模块子程序、PID电机控制子程序等。通讯中断子程序主要利用串口与树莓派进行通信,功能模块子程序为消毒喷洒装置控制函数、测温函数、LCD屏幕显示函数等。电机子程序内容为根据编码电机上的编码器返回的电机速度利用PID算法实时通过输出PWM波来控制电机的速度,从而保证机器人行进的稳定。
手机APP程序采用Android studio软件开发和编译,分为主控界面、数据显示界面、模式选择界面等。进入控制界面后,可在此界面控制机器人的前进、后退、左转、右转、旋转以及摄像头云台的俯仰与旋转。还可控制防疫机器人进入巡检模式、消毒模式、以及选择人员进行精确测温等。同时可在此界面查看机器人传回的实时画面。数据显示界面可查看机器人检测到的各类传感器数据的数值、拍摄到的未正确佩戴口罩人脸的照片、体温检测异常的人的身份等。
APP端对机器人的控制可选择不需要联网、时延低、控制距离有限的蓝牙控制,也可选择需要联网、时延相对较高、控制距离理论上无限的远程控制。当选择蓝牙控制模式时,手机蓝牙与防疫机器人身上的蓝牙相连来下发控制指令。当选择远程控制模式时,安卓APP通过MQTT协议与服务器建立连接,通过安卓APP将控制指令先发送给云端服务器,然后服务器再将数据发送给树莓派,从而达到对机器人远程控制的目的。
首先贴出卧龙凤雏团队与电磁炮的合影

最中间是总策划、酷爱军事、从小就造飞机的“曹工”,主要负责坦克车体外观及机械结构及PCB电路板的设计;左边的是我,负责机器人顶层控制逻辑中的视觉识别与追踪;右边是负责车体底层控制的“陈工”。
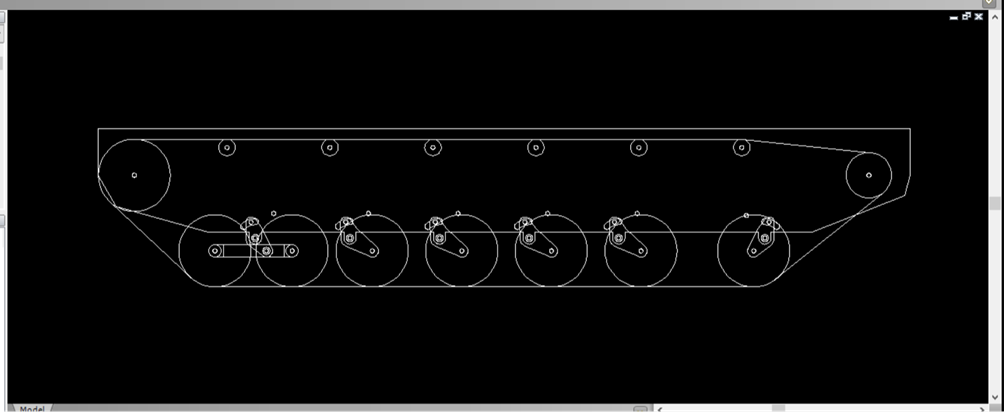
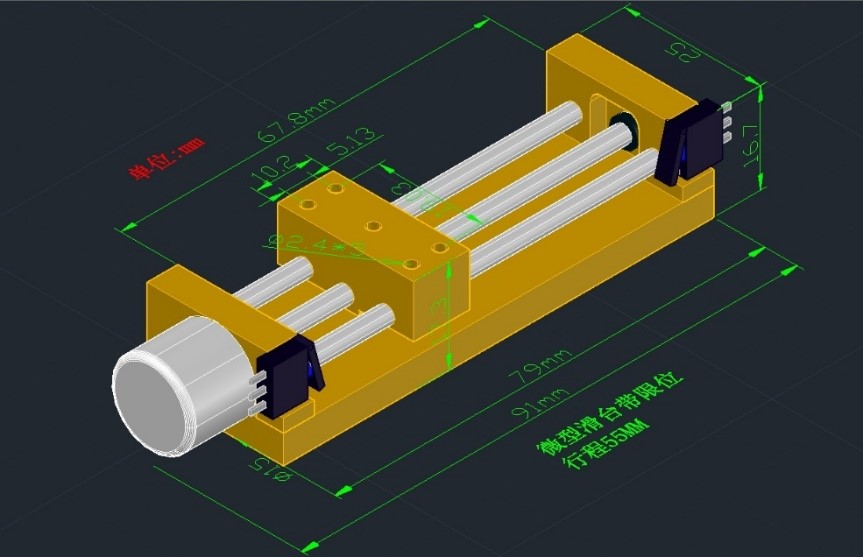
机器人底盘长788.45mm,宽308.00mm,高153.51mm,悬挂采用的是克里斯蒂悬挂系统,即一种拥有大直径负重轮,使用螺旋弹簧的独立式悬挂装置。这种悬挂均是由前后两个互相连接的圆柱形螺旋弹簧构成。位于前方的为可调式水平螺旋弹簧,后方的则是垂直螺旋弹簧,这种设计有更长的避震行程,可强化越野性能。
“曹工”组装车体

组装完成

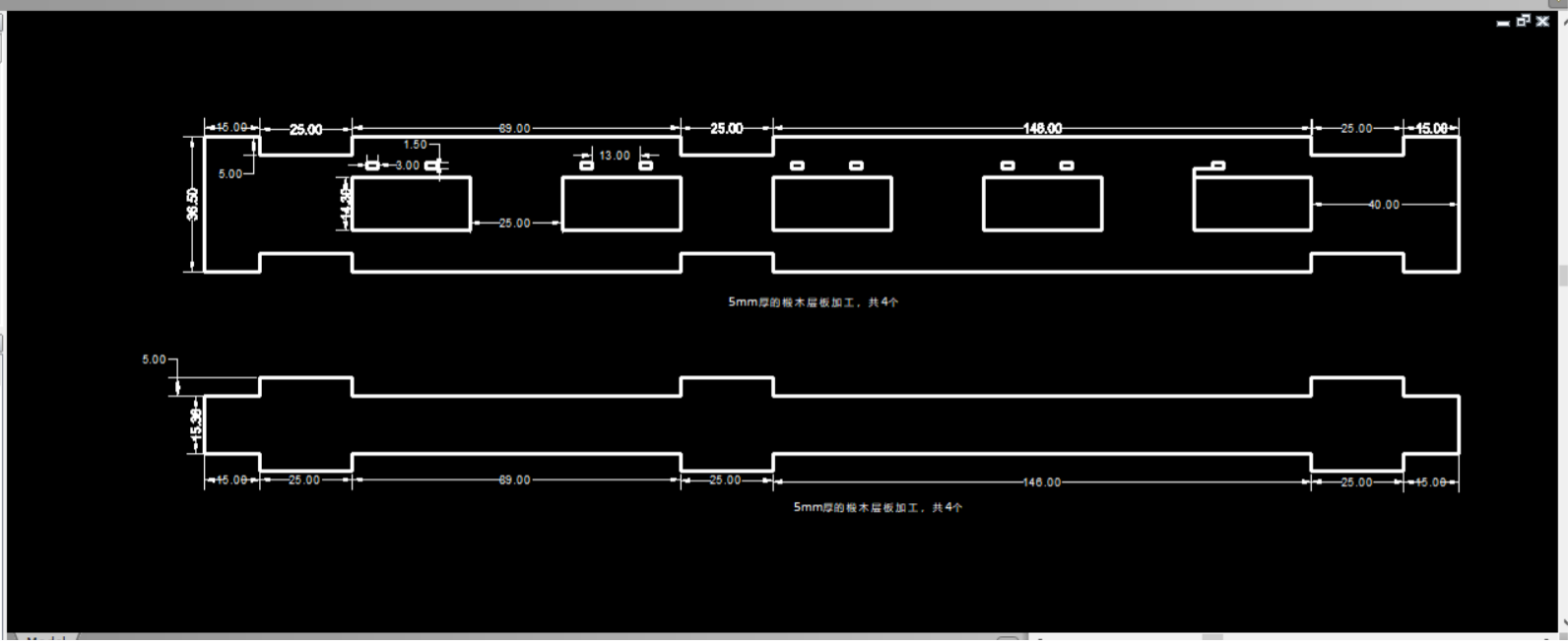
炮台底座也使用木制材料,中间开有41mm*174mm的矩形孔为炮位提供移动的空间,整个炮塔通过螺栓固定在履带底盘上部的旋转滑台上。磁加速系统的加速段整体用木板封装起来以此来达到绝缘的效果;为了防止热量堆积在炮管支架的木板上每一级加速线圈周围都开有方形空用来散热;
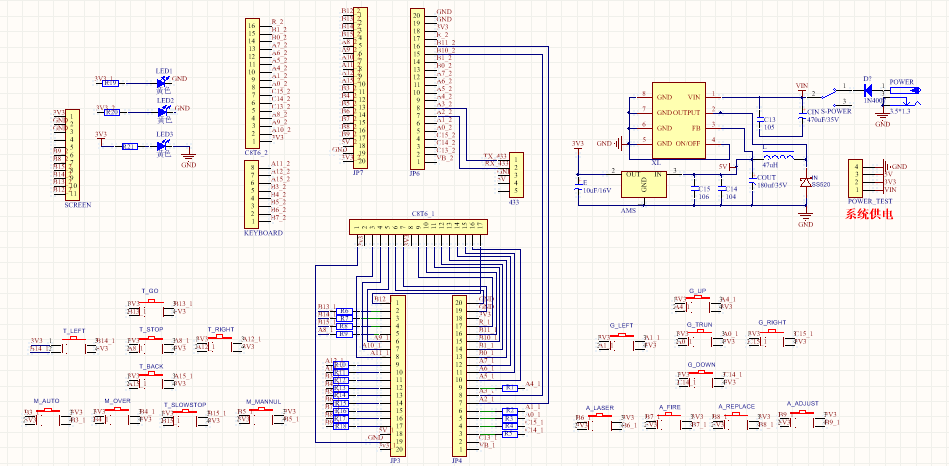
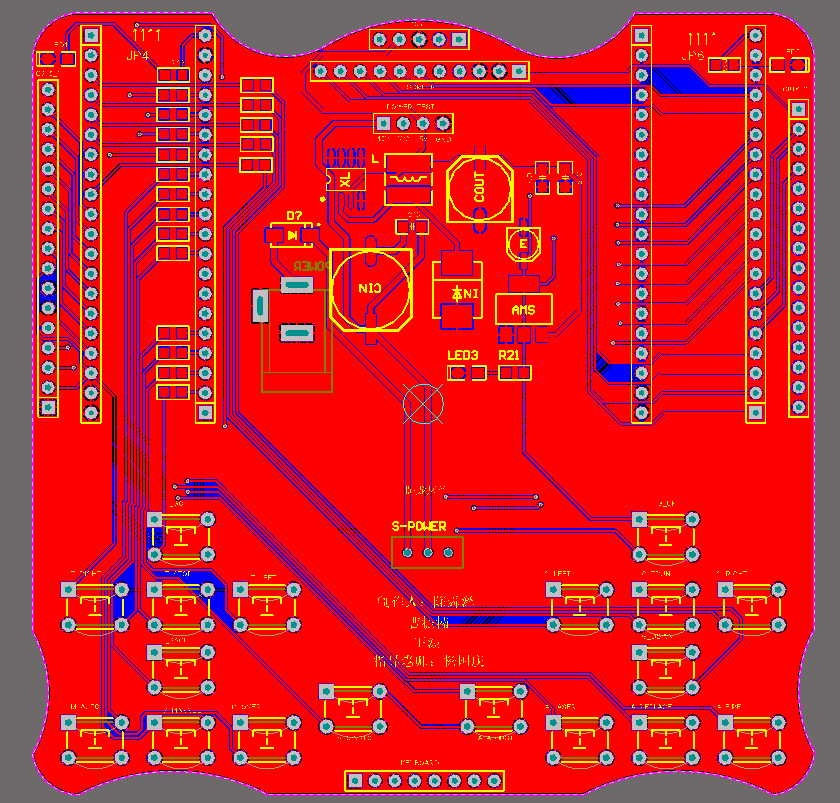
电磁加速系统为磁阻式电磁加速系统,采用五级线圈加速,光电门进行击发,电解电容储能,发射电压为400V。第一级电容容量为2000μF,第二级电容容量为1880μF,第三级电容容量为1880μF,第四级电容容量为1440μF,第五级电容容量为1440μF,这样的电容容量设计是为了减少炮弹在加速的过程中所受到的反拉


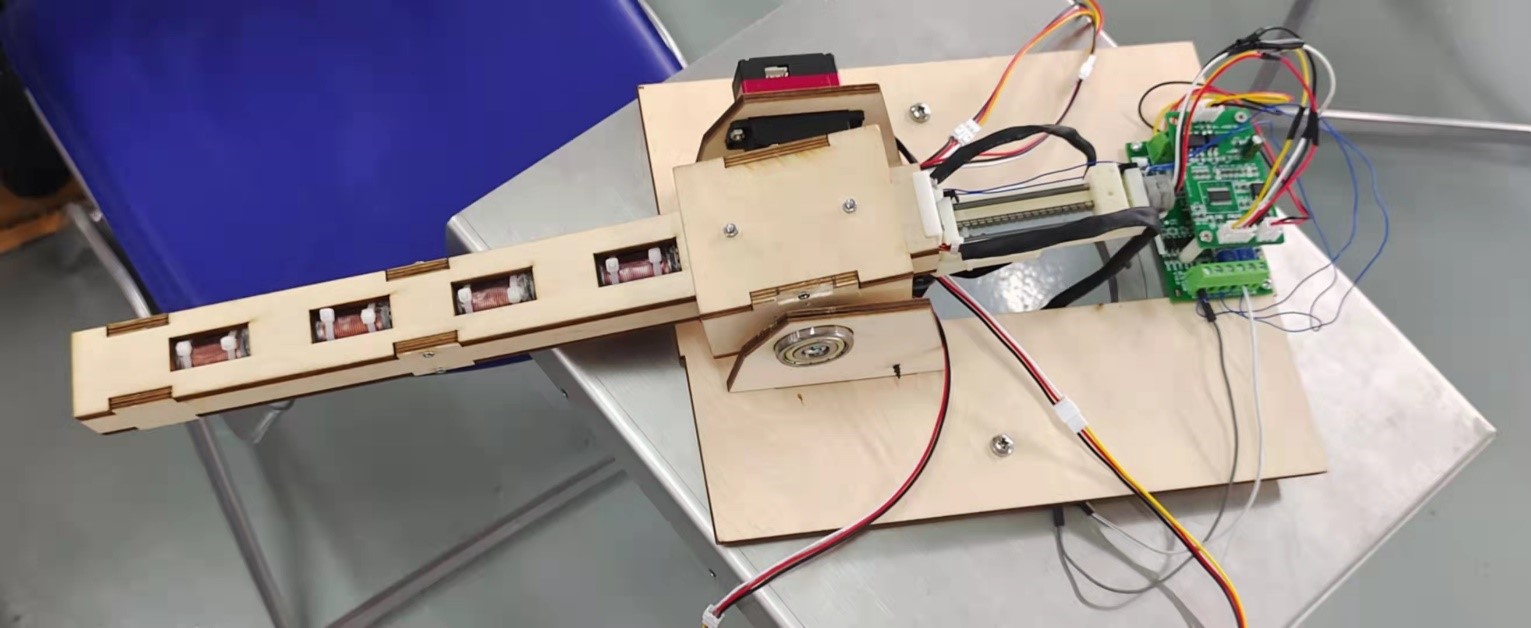
该磁加速系统配备有自动装弹机,装弹机安装在炮管的尾部并随炮管运动可以实现任意角度装填,装填机构通过丝杆推动炮弹并将其送入炮膛,丝杆由四线两相步进电机提供动力,在装弹机滑台的两侧安装有两个限位开关来限制推弹杆的移动空间。
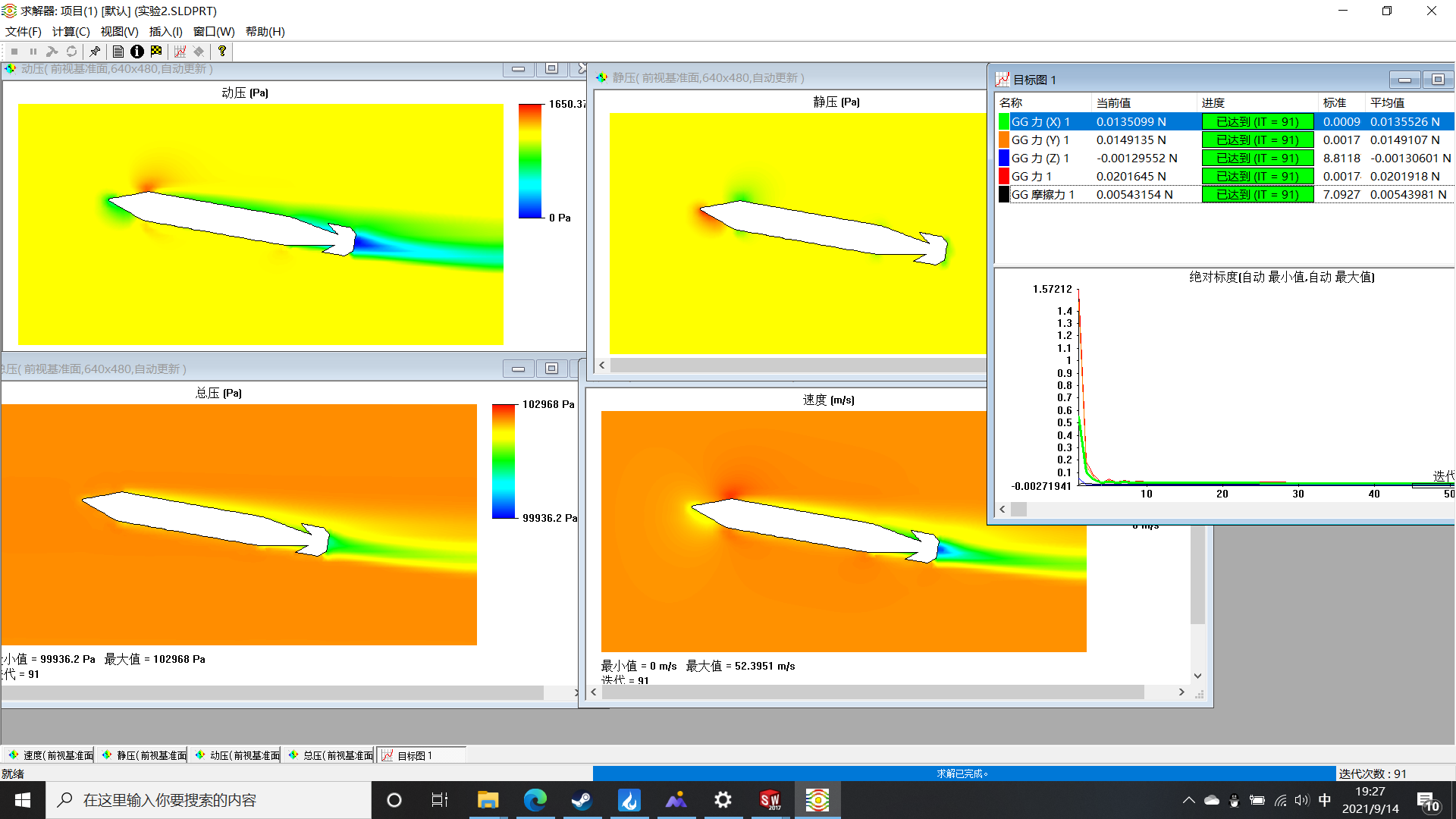
经过建立数学模型进行计算并通过测试,该磁加速系统可以将我们所设计的炮弹加速至45m/s左右。

开着出去,抬着回来
由于后来想要拿此机器人参加一些比赛,所以要为电磁炮想出应用一些民用价值。考虑到现在楼层建筑越来越高,若发生火灾消防部队扑救的难度很大,如果电磁炮可以对火源发出灭火弹则可迅速阻止火势扩大,因此就以“基于磁加速系统的高层建筑灭火机器人”为背景继续完善机器人。
初步方案是用树莓派进行火焰识别,并用舵机云台进行火焰追踪,将角度数据回传给底层STM32控制端后进行炮塔对火焰的追踪,最后再根据利用炮口的激光测距仪测出的炮口与火焰的距离进行炮弹射速的调整。
由于树莓派识别火焰的速率实在不敢恭维,于是家中有矿的”曹工“斥一顿早饭钱买了一块英伟达Jetson Nano边缘计算模块,Jetson nano与树莓派相比,NVIDIA Jetson Nano包含性能更高,功能更强大的GPU——NVIDIA Jetson Nano中具有128个CUDA核心的NVIDIA Maxwell GPU。NVIDIA Jetson Nano中更强大的GPU可以为图形处理,甚至人工智能(AI)和机器学习(ML)提供更强大的功能。
火焰识别算法采用的是NanoDet目标检测模型,NanoDet 是一个速度超快和轻量级的移动端目标检测模型,非常适合嵌入式部署。将在PC端训练好的模型移植到Jetson Nano边缘计算平台上即可进行火焰识别。识别到火焰后,根据火焰在视角中的位置,摄像头云台利用PID算法进行追踪。Jetson Nano通过PCA9655 舵机驱动板驱动摄像头云台舵机。
PID算法代码如下
1 | # *****************************************************************# |
火焰追踪主函数代码如下
1 | if __name__ == '__main__': |
火焰追踪效果如下
Jetson Nano火焰追踪效果
首先贴出卧龙凤雏团队与电磁炮的合影

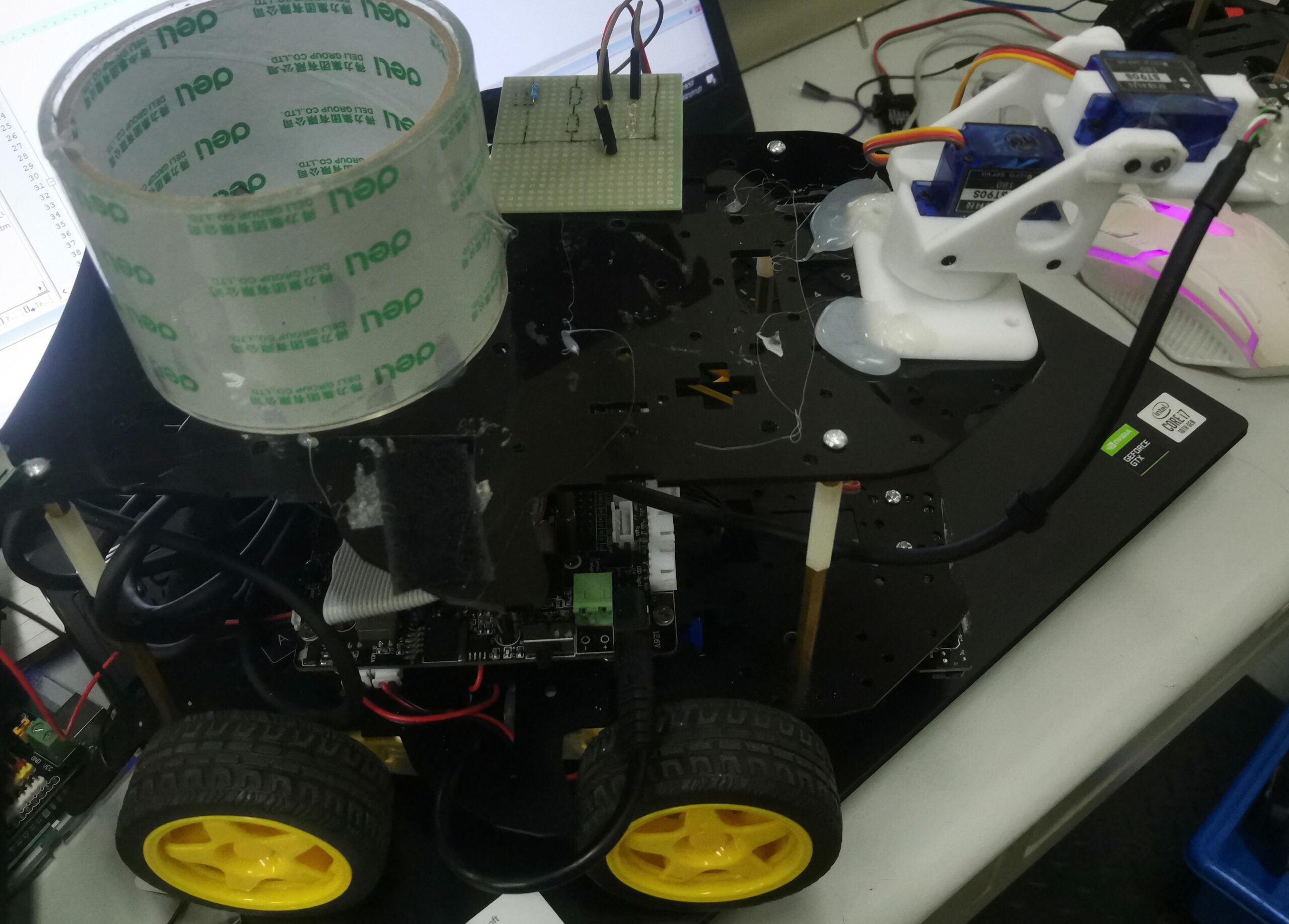
其他组的题目都是关于信号采集,AC/DC的这方面没怎么接触过,只有F组是关于送药小车的,正好手头有一个车架,于是就选了F组的题目。题目要求是先搭建下图带有几个路口的赛道,一共有八个药房,小车从起点出发前要先识别一个1到8的数字,然后根据识别到的结果小车需要沿着红线找到对应的药房。
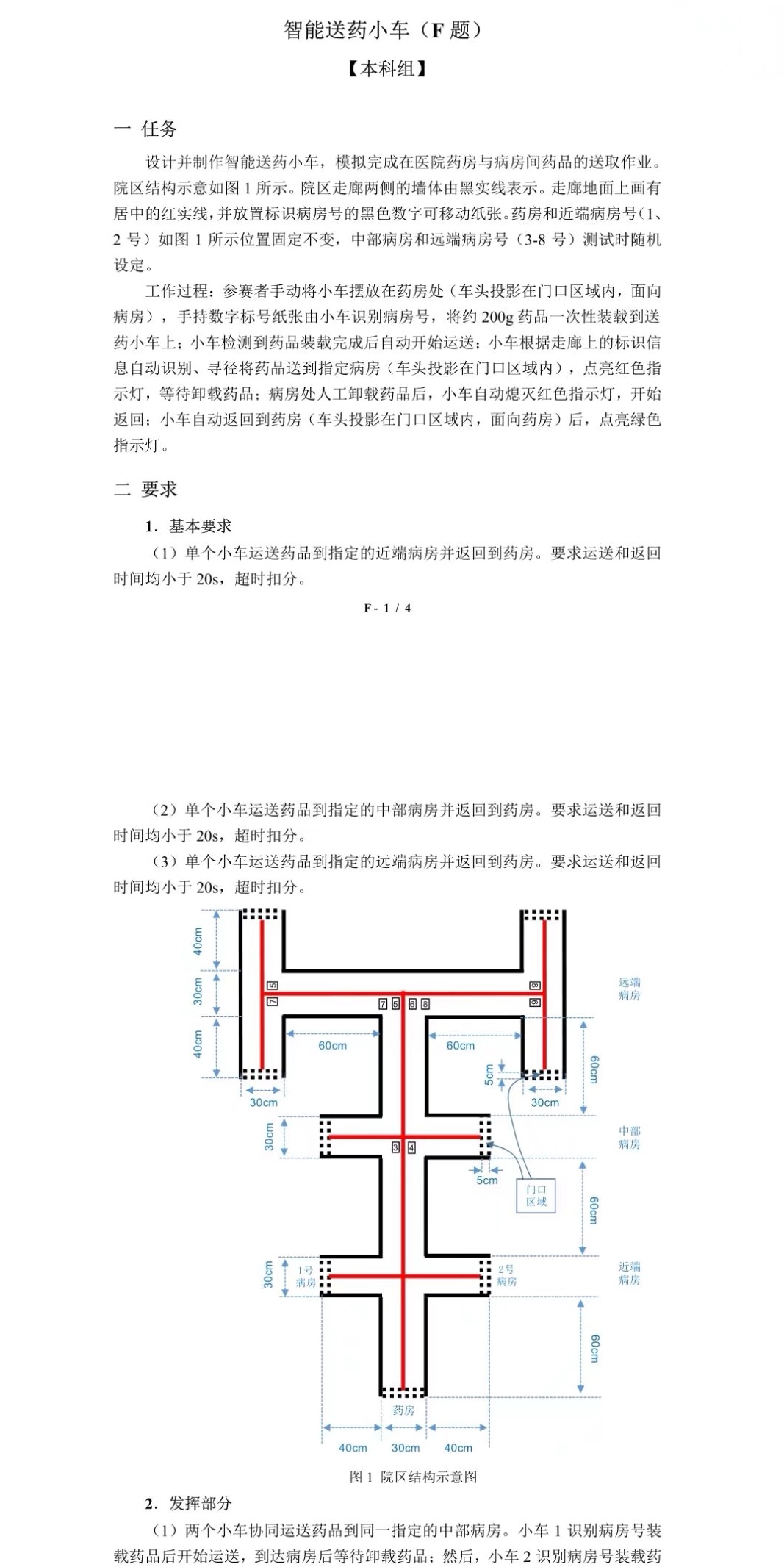
电赛每个小组有三个人,小组另外两个人,一个人只会写文档,一个人资历尚浅(现已是大牛),所以基本除了写文档的所有工作都落我头上了😭。首先要解决的就是识别数字,最好的方案就是拿K210,因为K210训练部署视觉识别模型迅速,并且有专门的NPU((神经网络处理单元)加速单元,识别也较为迅速。但是由于学校对于这类比赛很是轻视,没有任何资金补助(连电赛要用的纸箱子都不提供),赛前并未准备这类视觉识别模块。手头只有一个树莓派,网上利用树莓派识别数字的教程还挺多的的,多用python+opencv+tensorflow实现,我也尝试了一下发现识别的帧率只有十帧不到,这根本满足不了比赛的需求。此时已经到第二天上午了,电赛一共只有三天四夜的准备时间,万愁莫展之际我想到了一个下策,调用数字识别API,这可能有点耍阴招,但我看规则也没禁止这一行为(可能电赛加入视觉识别还没几年)。于是最终选择了调用百度api实现了数字。
接下来就是识别红线了,幸好学过一点点OpenCV,先对图像进行预处理,包括灰度化、平滑滤波、二值化,然后就能轻松框出红线了。效果如下
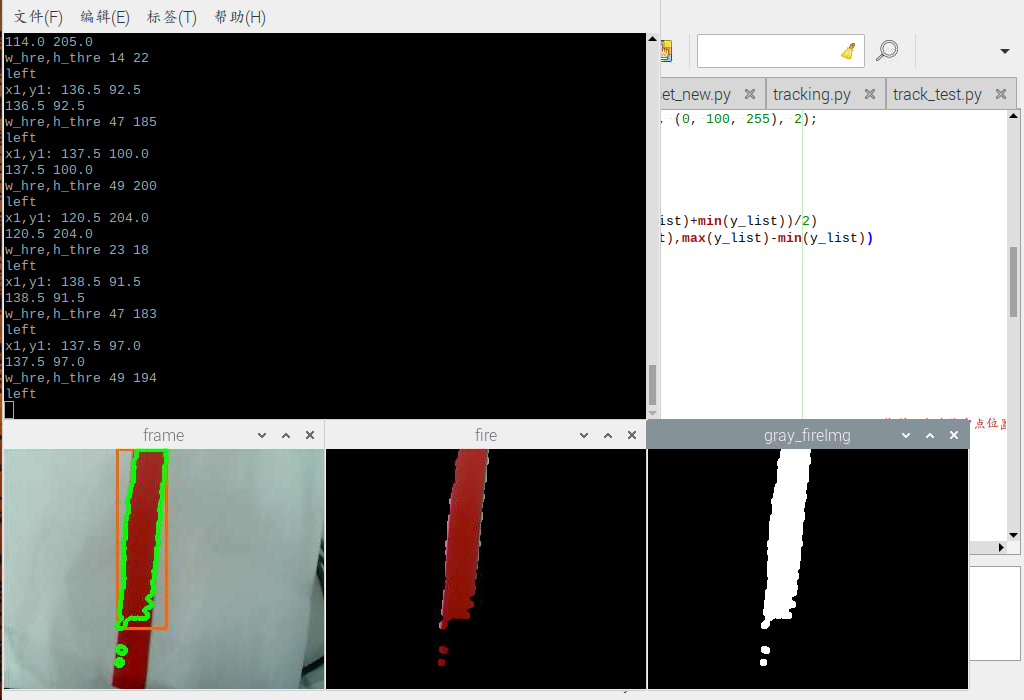
接下来要实现让送药小车沿着红线前进,根据识别红线框出的框在视野中的坐标对车轮转速进行PID控制,但还是由于客观设备的限制,手头只有普通的直流电机,没有编码器与编码电机,这样就无法对转速进行闭环控制,所以最后沿着红线行驶时,超调量较大,导致有时就会沿着红线左右摇摆。效果如下:
时间能力有限,到最后一天只能调成这样了,这个效果拿个省二等奖应该问题不大。但是到了最后开箱正式向评委展示的时候,发现电池没电了。。。。(调试时间太紧张,封箱前忘了给锂电池充电了)。最后小车动都没动起来,果然最终还是小细节决定成败啊😭。结果已经无法改变,总的来说这次电赛我还是学到很多的,三天四夜就没睡几个小时(提前体验996生活?😇),一直在调试软件硬件,查资料编代码的能力还是得到了一些锻炼的。
]]>